ネズミvs.AI×設計工学×ドローン 産学官金融連携
産学連携、高大接続の新鳥獣害対策プロジェクト誕生!

骨材に用いる原石をデータ化するなどユニークなAI技術を持つ食糧、建築資材卸などの(株)ヤマサ、最先端の設計工学とその最適化技術を有する信州大学工学部設計工学研究室(中村正行教授)、そしてロボットやものづくりのコンテストで数々の受賞歴を誇る長野県松本工業高等学校がタッグを組んで始動した、その名も“いたずらネズミとお手伝いドローンプロジェクト”。産学連携、高大接続による3者の最先端の電子技術を駆使し、米穀倉庫内に出没するネズミをAIが検知、全自動化されたドローンが追い払うという前代未聞のプロジェクトの全容をご紹介します。(文・中村 光宏/浅川 敬吾)
・・・・・ 信州大学広報誌「信大NOW」第136号(2022.11.30発行)より
3者によるプロジェクト

2022年9月29日、松本工業高校で記者会見が行われました。前列中央がヤマサの北爪社長、右から3人目が中村教授。後列左端が松本工業高校の三澤先生で、その前と右横に立つ4人がプロジェクトに参加する生徒たち。
取引先のコメ農家の多くが、倉庫内におけるネズミの食害に長年にわたって悩んでいる。罠や音、匂いなど旧来的な退治方法ではなくデジタルの力で何か新しいことができないか?̶̶そんな相談が信州大学に持ち込まれたのは2021年の暮れのことでした。
「イタチやネコなど天敵による対策は効果が高いと聞きますが、食品を取り扱う倉庫での実施はもちろん不可能ですし、当社のデジタル推進課が開発した骨材(※)製造のAIによる動体検知を応用することで、ネズミを捉えることはできそうだがそれだけではソリューションとして不十分。検知したネズミをどう追い払うのかについては、新しい方法を思いつくことができずにおりました」と語るのは、相談を持ち込んだ(株)ヤマサ代表取締役の北爪寛孝氏。産学連携コーディネーターを通じて届いたそんな課題に対し、協力を申し出たのが工学部の中村正行教授でした。
中村教授の専門は「設計工学」。物づくりにおける設計の「最適化」研究を通してノウハウを蓄積した線状立体構造物の3次元再構成の技術で、倉庫の建屋や内部装置、日ごとに変化するコメが入ったフレコンなどを3次元で空間データ化し、役立てることができると考えたのだそうです。さらに工学部の広報室長を兼務し、高大接続を推進する立場から、このプロジェクトへの参加を松本工業高校の三澤実先生に打診すると、100名以上という部員数と40年以上という歴史を誇る同校の部活動「電子工学
部」の4名が「やってみたい!」と快諾。それは、異なるフィールドでデジタルを知悉する3者の、産学連携・高大接続プロジェクトが始動した瞬間でした。
(※)コンクリートやアスファルト混合物を作る際に用いられる材料である砂利や砂などのこと
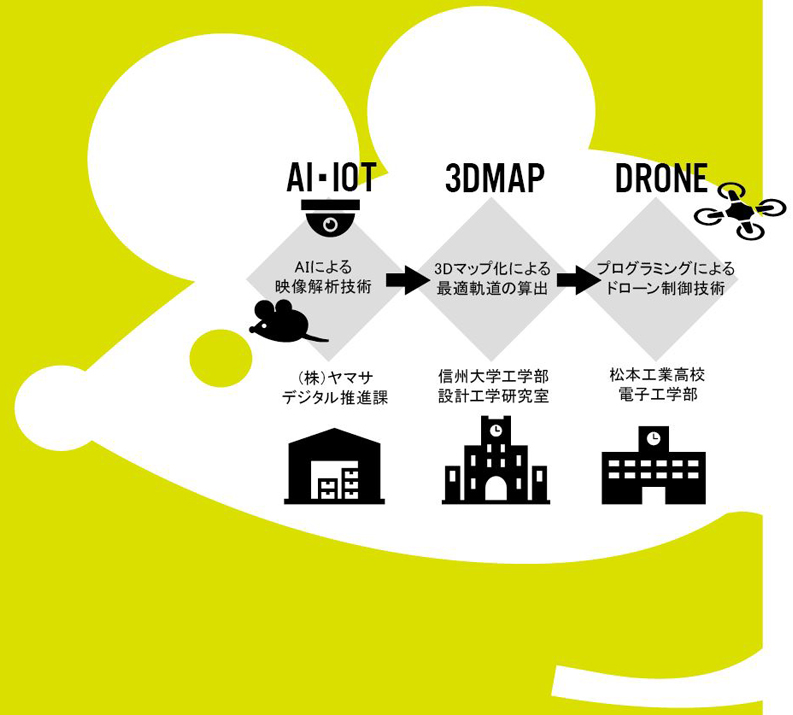
プロジェクトにおける各ミッションと技術領域
当初はラジコンカーだった

現在、カメラを設置してネズミの検知のテストとデータ集積が行われているのはヤマサの食糧倉庫。フレコンや米袋の数や高さが日々変化するため、3Dマップづくりは困難かつ重要な作業です。
中村教授の技術を用いて、ネズミの追い払いにドローンを使うというプランは早くから浮上していたのですが、当時、実は3次元再構成はすぐに実用化できるまでには研究が進んでいませんでした。「既にソフトウェアがあるにはあるのですが、まだ、例えば配管のような細長く入り組んだ形状のものを認識しづらいんです」(中村教授)。つまり、配管や設置された機械類がむき出しの倉庫はどちらかといえば苦手なフィールド。ドローンの自立航行自体にまだ多くの課題が残ることもあり、当初中村教授は、工業高校の生徒ならばラジコンカーの操縦技術は高いだろうという思いもあって、床の上という2次元で対処できるラジコンカーによるソリューションを模索してはどうかとも考えたそうです。
しかし、松本工業高校の4人の生徒が出した答えは、教授の意に反してプログラムを作るならドローンの方がはるかに簡単というものでした。「四輪のラジコンカーでは床面の状況によってスリップ誤差が出てしまう。対してコンピューターでプロペラを別々に制御できるドローンなら確実に精度が上がるというアドバイスを逆にいただきました(笑)」(中村教授)。
加えてドローンなら、原料の入ったフレコンを避けて進まなくても、自由に飛べる空間まで一気に上昇し、最短距離で移動することができます。三澤先生が、ドローンに搭載されるコンピューターをプログラムにより直接制御する技術をお持ちだったこともあり、予想以上に実現性が高く、早い段階での実装が可能になったドローンを採用することに決定したと言います。
「設計工学」による最適化が成否を握る
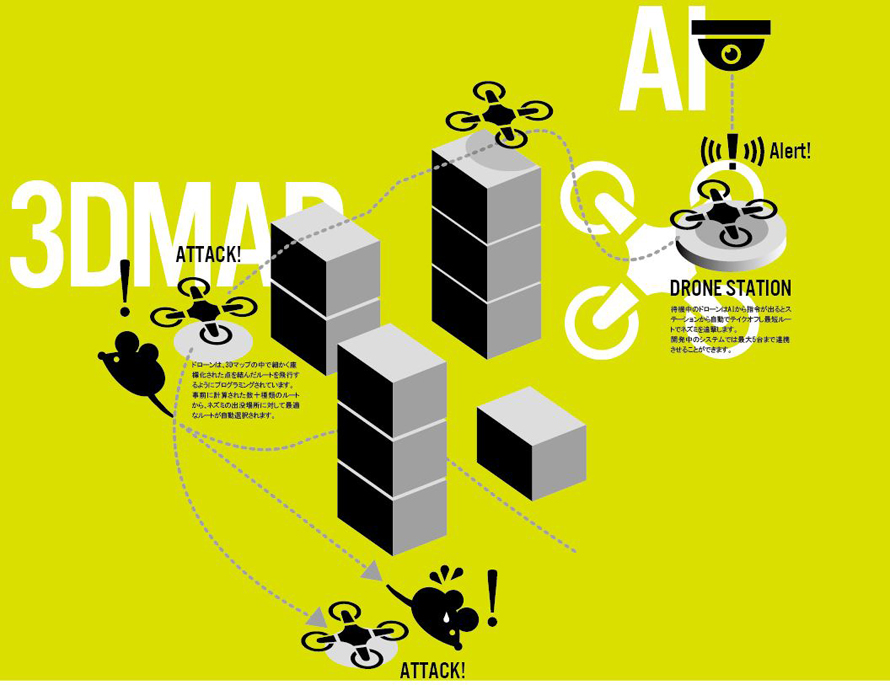
3者が目指すシステムを簡単に説明すると、まずコメ倉庫に動くものをカメラが検知→すかさずAIがネズミかどうか解析し、ある一定の確率を超えた場合には専用のクラウド上に位置情報をアップ→クラウドにアクセスしたドローン発着ステーションが、待機中のドローンに3Dマップに基づいて事前に作成された何十通りもの中から最適なルートを指示→ドローンが最速かつ効率的にネズミに近づき、プログラムされた示威行動を行う、というのが一連の流れです。もちろん任務を終えたドローンはステーションに戻り、次の任務に備えて充電、待機します。
そんな最先端のネズミによる食害対策システムの完成に向けて、現在はヤマサ倉庫内に設置したカメラの画像データをAIで解析するシステムを構築、信州大学が3Dマップの制作と捕捉したネズミまでの最適ルートをドローンに指示するシステムを構築。松本工業高校はシステムからのコマンドによるドローンの管制と運用を担当。ドローンの動き(示威行動)やステーションの開発を担っています。
もちろんどのパートも欠かすことはできませんが、やはり完成のキーを握るのは倉庫内の3Dマップ化とそれを元にしたドローンの軌道、すなわち無限に作ることができてしまうルートの中から最も適した軌道を生成することができる最適化です。中村教授は、最適化の技術を用いれば、動き回るネズミに合わせて逐一その位置情報を3次元座標に変換し、バッテリーの残量が尽きるまでドローンで追いかけ回すようなことも可能だと言います。
(株)ヤマサは、このプロジェクトの成果を他の動物にも応用し、鳥獣害対策の新しいデフォルトのひとつに育て上げることも検討中。物づくりと地球環境および人間との“調和”を実現する「最適化」の技術、まだ存在しない“未来”を計画し創造する「設計」の技術をキーフレーズに据える中村教授と研究室の、プロジェクトの成否を握る新しい挑戦は今、はじまったばかりです。
「三人寄れば文殊の知恵」。産学連携で問題解決を果たしたい

株式会社ヤマサ
代表取締役社長
北爪 寛孝氏
今回のプロジェクトに携わったのは、2021年に立ち上げた総務部デジタル推進課です。それまで弊社はDX化に関しては非常に遅れていて、基本的な財務処理さえ紙媒体で行っていました。生産性が悪いことは明らかだったので、思い切ってエンジニアを雇用しました。外部に委託するのではなく、自社にエンジニアがいてくれることで、物事をスムーズに進めることができ、社内のDX化だけでなく、AIによる画像検知という領域にまで一気に広げることができました。
弊社は、祖業として約150年に渡りコメを取り扱っています。取引先のコメ農家の悩みの種となっているネズミ問題に対して、DXで解決策を見出せないかと考えたことが今回のプロジェクトを立ち上げたきっかけでした。
しかし、AI技術でネズミを検知することができても、追い払うことができなければ意味がありません。そこで、弊社だけでは解決には至らないと思い、昨年の秋頃に信州大学に共同研究の依頼をしました。
結果、産学連携のプロジェクトとして弊社を含む3者が協力する体制となりました。ドローンの制御技術は松本工業高校、3Dマップでのドローンの最適なルート検索は信州大学、そしてAIカメラで倉庫内を俯瞰で捉えてネズミを検知し、その座標情報を送信するのが弊社の役割です。弊社だけでは対応しきれない問題に、3者が持つそれぞれの技術を連携させることで、先進的な解決策を生み出すことができました。
完成後はネズミ以外の鳥獣害対策にも応用していくほか、ネズミが多く発生する農家の倉庫でもカメラを設置するだけで利用できるようなクラウドサービスを提供していきたいと考えています。また、ネズミの生態や駆除法に精通している事業者との連携も検討しており、これが叶えば、ドローンの駆除性能を更に向上させることができるという、今後に対する期待感も抱いています。

ヤマサは創業150年を誇る老舗企業、歴史・伝統+DXという考え方がすごい。
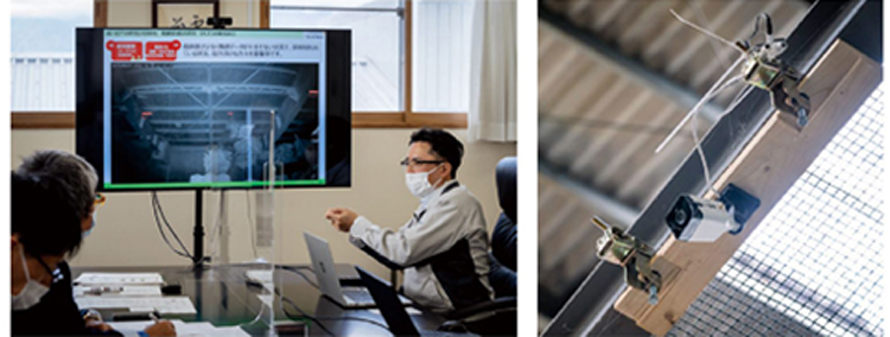
(写真右)ヤマサ食料倉庫の梁に設置されたネズミ監視カメラ。高所から全域を俯瞰で捉え、ネズミか否かをAIが判断する。(写真左)その確率が設定値以上になった場合、位置情報をクラウド上に送信する。
「最適化」による軌道生成技術の確立を目指す

信州大学学術研究院(工学系)
工学部機械システム工学科
中村 正行 教授
私の研究室では、ドローンを使用して葉の付いていない樹木の枝を細かくデータ化していくという取り組みを2年ほど前から行っています。その取り組みの中で培ってきた工学技術を倉庫内のネズミ駆除にも技術転用できると思い、今回のプロジェクトに加わりました。
このプロジェクトの中で私たちの設計工学に基づいた技術が必要となってくるのは、ドローンの軌道を生成する場面においてです。設計工学において主要な研究分野である最適化の技術を応用します。そもそも最適化とは、様々な環境要素を考慮して必要な条件を満たす最適解を生み出す技術のことで、例えば太陽光パネルの配置最適化といった事例が挙げられます。設置する敷地の形状や緯度は様々で、必ずしも真南に向けてパネルを設置することが最善とは限りません。そこで最適化の技術を用いれば、敷地の形状や影のかかり方等に合わせて受光量が最大となるパネル配置を割り出すことができるのです。
今回はその技術をドローンの軌道生成に用います。目標点となるネズミは当然動き回るので、ドローンはそれに合わせて軌道を変える必要がありますが、最適化の技術を用いることで、クラウド上に遂次保存されていくネズミの位置情報を3次元座標に変換し、そこから考えられる無数の軌道の中から最適な軌道を見つけ出すことが可能となります。
最適軌道生成の問題は組み合わせ最適化問題として解きます。最適化問題の中でも解くのが難しい部類に入るため最適解の算出にはかなりの時間を要するのですが、私の研究室で開発した軌道生成アルゴリズムを適用し改良することで現実の問題に対する解法として社会実装していくことが目標です。また、近年日本では機械工学に関わる技術者が不足しています。高大接続で高校生も実践の場に立ってもらいながら、機械工学をベースにした製品開発や技術開発などにも取り組んでいきたいと思っています。
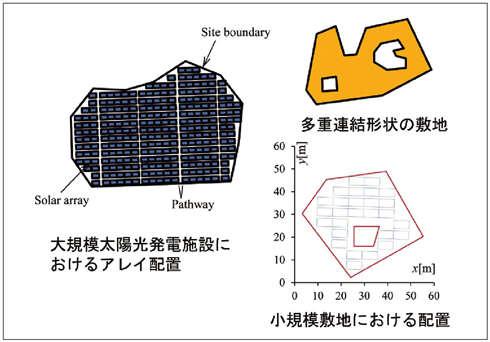
複雑形状の敷地における太陽光発電アレイの最適配置を計算した例。もちろんアレイの向きなども計算され最大出力となる設計。
独学習得のプログラミング言語でドローンを制御する

長野県松本工業高等学校
電子工学科・電子工学部顧問
三澤 実 教諭
電子工学部は部員数100人ほどの部活で、マイクロロボコン高校生大会で2連覇を果たした西脇君らを含む4人が今回のプロジェクトに携わり、ドローンの自動運転のための制御プログラムを自分たちで開発しました。使用したのはAIとも親和性が高いプログラミング言語のPython(パイソン)です。学校の授業では教えていないので、彼らが一から自分たちで勉強しました。
私は顧問ですが、あくまで部活動ということで、ヒントを出すことはあっても、教えることはありません。常に自分たちで何をしたいのか考えてもらい、活動環境の整備も、目標設定も彼らが自分たちでやるようにしています。今年2月にドローンが本校に導入され、初めは飛ばすことすらままならない状態でしたが、短期間のうちに様々な知識を吸収し、壁にぶつかりながらも、どう克服していくかを日々考えて取り組んでいました。ドローン制御の「慣性誘導」という言葉も大学レベルの用語ですが、彼ら自身で勉強して会得していきました。
このような自主的な姿勢は今、大学だけでなく高校でも育まれています。本校でも「主体的に、探究的に」ということをテーマとし、困っている人の話を自分事として捉えることを勧めています。過去にも、私たち高校側から産学官連携を持ち掛け、市などと連携しながら、高校生が主体となって問題解決に取り組んだことがあります。そういった経験が彼らの後ろ盾になっているのだと思います。
今回のプロジェクトは大きく分けると3ステップになります。ドローンを制御して目的の座標まで飛ばすのがステップ1。ステップ2は信大との連携で、3Dマップのナビゲーションになります。そして、ステップ3はAIカメラと連動してネズミをトレースする技術です。現在、ステップ1が達成でき、これからステップ2に入っていきますが、今後も自主的かつ探究的に、自分たちが取り組んでいることの意義を見つけてもらいながら、このプロジェクトを完結させていくことを目指しています。
参加メンバーは全員3年生。夏休み返上でプロジェクトに取り組んだ。左からリーダーの宮沢さん、プログラミング担当の西脇さん、ドローンの発着ステーションを担当した大月さん。