信州大学先鋭領域融合研究群 日本初の医・工・繊維連携の融合研究プロジェクト 歩行アシストサイボーグプロジェクト5年間の軌跡。
「装着型」ロボティックウェアcurara®(クララ)の実用化と「体内埋込型」サイボーグプロトタイプ完成を目標に掲げ走り続けた5年間。


思えば2015 年、超高齢化社会を見据え、高齢者の自立歩行をテーマに文部科学省運営費交付金特別経費(機能強化プロジェクト)の採択を受け、日本初の医・工・繊維連携の融合研究プロジェクトとして、この先進的プロジェクトはキックオフしました。
報道発表の後、文部科学省情報ひろばでの展示も行ってから早5年が経ち、今年度でプロジェクトは一旦の区切りを迎えました。
当初掲げた目標の「装着型」実用化と「体内埋込型」プロトタイプ完成の目標はなんとか達成でき、体内埋込という夢のような技術も道筋が見えてきました。
来るべき未来の歩行アシストロボットの姿も少しご紹介できそうです。(文・柳澤 愛由)
・・・・・ 信州大学広報誌「信大NOW」第126号(2021.3.31発行)より
「装着型」生活支援ロボティックウェアcurara®(クララ)2021年製品化へ 人に寄り添う「着るロボット」、生活支援ロボティックウェアとして貫かれた開発コンセプトのcurara®(クララ)が遂に実用化のステージに。
2020年10月末、遂にプロトタイプ最終モデルとなるcurara®(クララ)を発表

信州大学繊維学部 特任教授
橋本 稔
電気通信大学助手、鹿児島大学助教授を経て信州大学教授、2018年に定年退職し、現職。研究分野はバイオロボティクス。
開発開始から約10年を経て、生活動作支援ロボットcurara®(クララ)がいよいよ実用化のステージに入りました。衣服のように着るロボット=ロボティックウェアをコンセプトに、信州大学繊維学部の橋本稔特任教授が2008年頃から零号機の試作を開始、2020年10月末報道陣を招いて、実質上5号機となる製品版のプロトタイプ「curara®WR-P」を披露。量産化を見据えた、ほぼ完成形のモデルで、現在は信州大学発ベンチャーAssistMotion(株)が事業化に向けた準備を進めています。
2015年に始まった「歩行アシストサイボーグプロジェクト」は、体内埋め込み型の歩行アシストロボットの開発と同時に、すでに開発が進んでいたcurara®の実用化もミッションのひとつとして掲げてきました。事業最終年度である2020年に、ほぼ完成形となるモデルの開発に成功したことになります。
「curara®WR-P」は、2017年に発表された4号機と同様、股関節と膝関節横に左右2つずつ、合計4つのモータとセンサを備え、背中にコントローラとバッテリーを背負い、それらをフレームとベルト類で体に固定する構造です。重量は約4キロ。フレームの改良、バッテリー重量の最適化を行った結果、4号機と比べ約1キロの軽量化を実現しています。また、4号機で採用していた脚の前面に回り込むフレームを排し、動きやすさを重視した直線型のフレームに回帰。より小型化し、体にフィットするよう形状やデザインも一新しました。
「量産化を見据え、モータや減速機などの部品も見直しました。さらに、これまでは平面での歩行アシストのみでしたが、今回新しく『階段昇段』をアシストするモードも加わりました。これで、高齢者の負担となりやすい階段の上り下りといった動作へのアシストも可能となりました」と開発者の橋本特任教授。健常者であれば1人で着用できるうえ、着脱にかかる時間は1分程度。モードの切り替えやアシストの開始・停止などの操作は付属のタブレットで行い、フル充電をすれば1時間の連続駆動が可能です。
零号機から数えて10年最終モデルとなる5号機へその道のりを開発者に聞く
curara ®の1号機が開発されたのは2011年。広報室では、開発当初からその変遷を追い続けてきました。年を追うごとに各パーツの形状や機能性、課題となっていた重量などが改善されてきており、製品化を目前に控え、感慨深いものを感じます。
curara®の特徴は、大きく3つ。1つ目は「同調制御法」という、人の動きに同調し動きをアシストする、人に優しい制御系である点です。2つ目は、「相互作用トルク(力)検出法」。人が動こうとする際のわずかな力でも検出できるセンサ技術が用いられており、装着者の動きに合わせたアシストを可能にしています。3つ目は、「非外骨格型構造」である点です。人の関節にモータの力を直接伝える機構となっているため、ロボット関節の間をつなげる外骨格(リンク)を用いる必要がなく、軽量化と動きやすさを実現します。これらの特徴は開発初期の段階から持っていたものでしたが、着脱が容易な“着る”ロボットというイメージをより具現化するため、改良を重ねてきました。
「リハビリ訓練での利用を目的としているので、想定される利用者は高齢者や障がい者がほとんど。軽量化と動きやすさ、着脱の容易さを求めることは不可欠でした。現在は、健常者であれば1人で着ることもできるようになりましたが、高齢者や障がい者の場合は補助が必要です。いずれはハンデのある人でも一人で着られるようになることを目指しています」(橋本特任教授)

AssistMotionへ出資するセキュリティー会社のラック本社(東京都)で開いた報道発表の様子。橋本特任教授もcurara®(クララ)の機能説明など行う。

curara®(クララ)のデモ。モータの力を関節に直接伝える「非外骨格型」のため、しゃがみやすい

ベンチャー支援企業も参画、すでに現モデルでレンタル開始、2021年内には製品化される予定
製品版は2021 年中にリリース予定。福祉施設や病院などでのリハビリ支援での利用を想定しています。事業化にあたりAssistMotion(株)は、神奈川県や川崎市などが資本を持つビジネスインキュベーターの(株)ケイエスピーと、セキュリティー会社の(株)ラックの2社から開発費の出資を受けることとなりました。本プロジェクトが構想するスマートシティへの期待も、出資を後押ししたそうです。
「いずれ、リハビリだけでなく、高齢者や障がい者の自立支援のため、curara®を日常的に装着できるようになる社会を目指しています。ハンデがある人の健康増進にも役立てたいですね。将来的にはロボットを補助者とすることで、誰もがより安心安全に暮らせる街づくり、スマートシティの構築を目指したいと考えています。まだまだ道半ばですが、ロボットがIoT機器となる日もそう遠くはないと思っています」(橋本特任教授)
2020年9月からは有償でのモニター貸出も開始しており、すでに横浜市で開催されたヨコハマトリエンナーレの催しのひとつとして3か月間利用され、延べ500人がcurara®を実際に体験しています。その調査結果をもとに、さらなる改良を行う予定です。製品化に伴う課題は価格設定。現在、有償モニターは初期導入費を6万円、レンタル料を月8万円に設定しており、2週間は無償で利用することができます。製品版ではより安価に提供できる体制づくりも目指します。
curara®の技術の多くは、体内埋め込み型アシストロボットの開発にも応用されています。製品化に伴う知見が埋め込み型にどう応用されるのかにも、期待がかかります。
「体内埋込型」コンセプトプロトタイプ完成見えてきた10年後の未来。2021年1月、同プロジェクトはついに埋込型ロボットのコンセプトプロトタイプを発表。そこから見える未来シナリオを紹介
3人に一人が高齢者となる時代のイノベーションの象徴として

先鋭領域融合研究群
バイオメディカル研究所長
学術研究院(保健学系)教授
齋藤 直人
1988年信州大学医学部卒業。同医学部附属病院医員。1996年同医学部助手。1 9 9 9 年同医学部講師。2004年同教授。2014年よりバイオメディカル研究所長
2040年には3人に1人が高齢者になるとも言われます。当然自立歩行が困難な方も増えていきます。信州大学はこれらの社会的課題を背景に2015年から国の支援を受け、体内埋込型の歩行アシスト装置(サイボーグ技術)の開発を行ってきました。すでに開発中であった体外装着型のロボティックウェアcurara®の実用化と合わせて、体内埋込型のプロトタイプ製作までをまずはプロジェクトの目標としました。装着や持ち運びの手間、活動場所の制限などの課題を解決するもので、実現すればもちろん世界で初めてとなる試み。信州大学の特色ある先端研究、医療機器開発/脳神経疾患治療/運動機能評価技術(医学)とロボット/バッテリー/カーボン/ファイバー技術(工学・繊維学)を結集した日本初の医学・工学・繊維学分野の連携研究で、社会に大きなインパクトを生み、期待されるプロジェクトとなりました。
体内埋込が理想形とされる理由と実現のためのハードルの高さ

体内埋込型技術が理想とされる大きな理由は3つ。そのひとつは「介護者不要」。歩行障害をサポートするロボットという概念では、現在はアシストスーツなどを「外部装着」する必要があり、高齢者や障がいのある方には、ひとりでの装着は難しく補助する方が必要でした。2つ目は「持ち運び不要」。例えば旅行など、遠くに行く際に、これまでのロボットスーツは大きな荷物として「持ち運ぶ」必要がありました。3つ目は「使用環境を選ばない」。例えばお風呂やプールでは、当然その都度、着脱の必要がありましたが、その面倒さから解放されます。これらは理想であり、究極形とも言われる新しい仕組みですが、この夢の技術を実現するためには、様々な課題もあります。特に、生体材料や医療機器の開発を専門にする、バイオメディカル研究所の齋藤直人所長(生体医工学)と、体外装着型のロボティックウェアcurara®の開発者である繊維学部の橋本稔特任教授(ロボット工学)、サイボーグ技術には不可欠といわれる、全結晶型二次電池の開発に、先鋭材料科学研究所の手嶋勝弥所長(無機材料科学)が中心となって進められました。
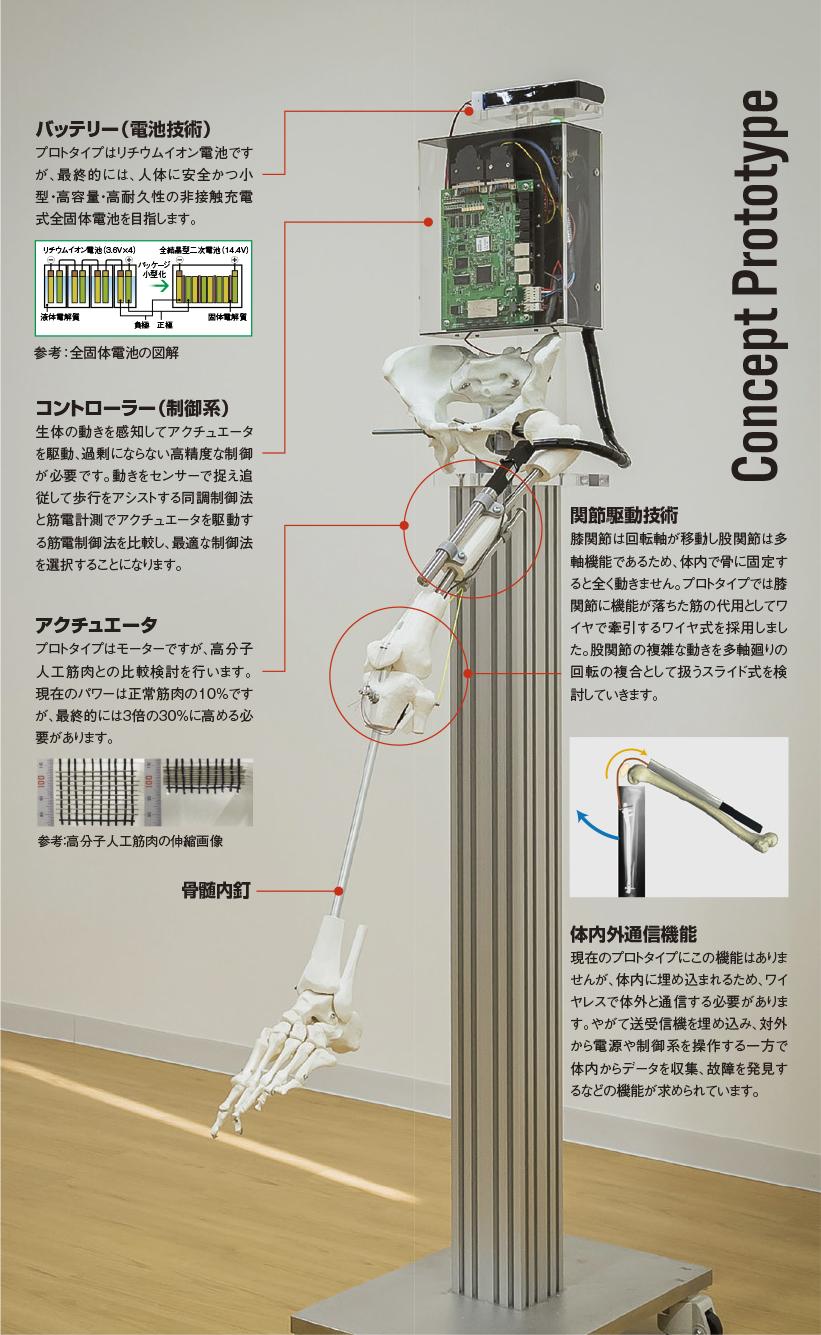
骨髄内釘を埋め込むという手術は骨折などの処置として、整形外科では日常的に行われているものですが、それ以外のアクチュエータやコントローラーが安全に機能するか、関節がきちんと動くかなど、きわめてハードルが高い研究開発プロジェクトでした。各パーツの小型・軽量化・耐久性などはもちろん、スムーズな関節駆動方法の開発や生体親和性など人体との関連課題は山のようにありましたがひとつずつクリアを重ね、現在のコンセプトプロトタイプの完成に至っています。
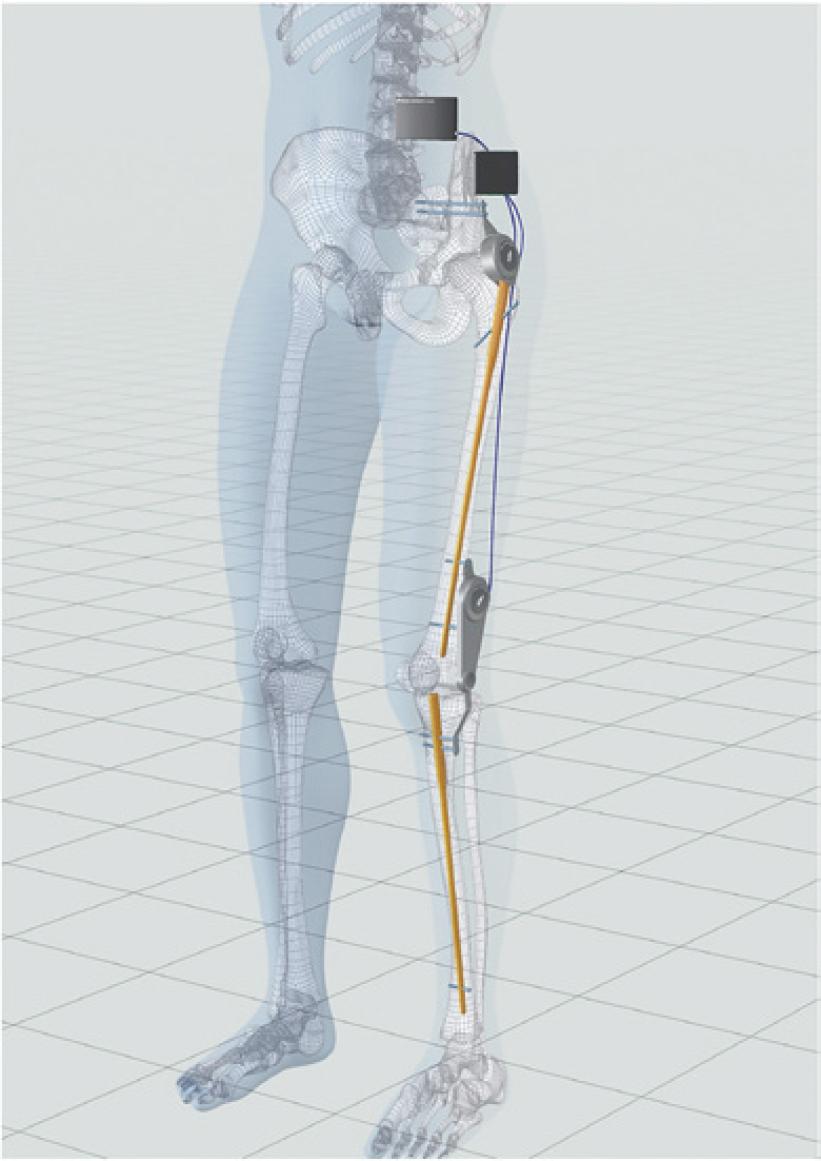
Walking Assist Cyborg( Image)
プロジェクトキックオフ時に作成した埋め込みのイメージ画像
信大らしい医工連携融合研究で 埋込型の実用化も夢じゃないところまで来た。
膝関節デバイスをワイヤ方式とした背景と利点

小関 道彦
学術研究院(繊維学系)教授
繊維学部(機械・ロボット学科バイオエンジニアリングコース)
私は、口腔外科領域や整形外科領域の怪我や疾患について、コンピュータシミュレーションを用いて力学的な視点からの検討を行っています。特に、患者さんの骨組織の力学状態を解析することにより、整形外科領域の新しい治療方法を考案、疾患の原因を解明したいと考えています。
本プロジェクトリーダー、齋藤教授から「体内に埋入したデバイスを駆動したときの骨の力学状態を調べて欲しい」との話をいただいた頃、当時構想されていたデバイスは、curara®の機構をそのまま体内に埋め込むイメージでした。
しかし膝関節を詳細に観察すると、蝶番のように一つの軸で回転するだけではなく、関節面が回転しながらスライドする、という複雑な動きをしていることが分かります。curara®は、一つの軸で回転するモータを、体外にゆるやかに装着するのですが、このような複雑な動きをする膝関節に対して、一軸で回転するデバイスを骨にがっちりと装着すると、間違いなく関節が壊れてしまいます。
こうした問題点を解決するいくつかのアイデアが挙がり、今回作成したプロトタイプでは左写真で解説するワイヤ方式を採用しました。これは、我々の関節が「筋が腱を牽引して駆動している」ことに基づいています。筋肉の駆動が不十分な患者さんの動作をアシストする手段として筋肉の駆動方式をまねているワイヤ方式は、非常に理想的であると考えています。
股関節への展開方法など見えてきた今後の課題
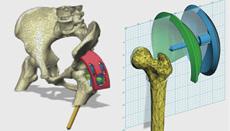
(図)スライド式のイメージ。関節の動きを多軸廻りの回転の複合として扱う。
筋肉が出力できる力や速度は非常に大きなもので、人工的にこれを再現することは現時点では難しく、今回試作したアクチュエータでは歩行に必要な筋力の100%を賄うことはできないため、あくまで高齢者の歩行をアシストする用途になります。
我々のチームが開発した今回のデバイスに対し、その動作や制御の検証は橋本研究室と大学発ベンチャーAssistMotion(株)の皆さんが取り組んでくださいました。ワイヤ方式の場合には検知できる力の大きさや関節の途中でワイヤに加わる抵抗力の考慮など、curara®に比べて大幅に考慮すべき事案が多かったと聞いています。
また、今後の難関でもある股関節への対応では、モータの回転軸を股関節の回転中心に対して移動可能なスライド方式を考案しました(図)。股関節は屈曲・伸展という身体の前後方向の大きな動きに加えて、内旋・外旋、内転・外転という3つの軸に対する回転運動ができる関節(機械工学ではボールジョイントと呼ぶ)であるからです。
現時点では、屈曲・伸展だけはモータによるアシストを可能とし(アクティブ)、内外旋と内外転については生体の動きに追従できる仕組み(パッシブ)を考えていますが、既存のデバイスでは大型化してしまいます。現状では平面的な超音波モータを立体的にしたような新しいデバイスが実用化されると、サイボーグ用途にも期待できるのでは、と考えています。
デバイスの高性能化などまだ解決すべき課題は多々残されており、実用化にはまだ道半ば。さらに多くの分野の研究者の参入が必要と思われます。信州大学が得意とする医工連携テーマで一丸となって取り組み、今後も開発が発展することを願っています。