2023年2月9日(木)
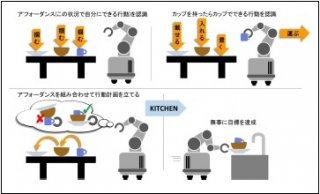
ロボットの作業手順を提案する知能システムを開発
※本件の詳細につきましてはこちらの資料をご参照ください。
信州大学工学部のアーノード・ソービ准教授、山崎公俊教授およびエプソンアヴァシス株式会社からなる研究グループでは、ロボットのための新たな知能システムを開発しました。この知能システムを用いれば、ロボットは作業の手順を自ら考え出し、ユーザーが指定したとおりに物品を配置することなどができるようになります。この成果は、信州大学工学部人工知能共同研究講座での研究活動に基づくものです。詳細はIEEE Robotics and Automation Lettersに掲載されています[1]。
論文情報
[1]S. Arnold, M. Kuroishi, R. Karashima, T. Adachi and K. Yamazaki, “Recognising Affordances in Predicted Futures to Plan with Consideration of Non-canonical Affordance Effects”, IEEE Robotics and Automation Letters, 2023.
(URL: https://ieeexplore.ieee.org/document/10025365)
[2] 動画: https://youtu.be/4naJ5IghHcg
〈研究に関する連絡先〉
信州大学工学部機械システム工学科 教授 山崎 公俊
Tel: 026-269-5155
E-mail : kyamazaki@shinshu-u.ac.jp