2022年11月17日(木)
The 2022 Robotic Grasping and Manipulation Competitionsにおいて工学部機械システム工学科山崎研究室のメンバーがWinnerに
ロボティクス分野の国際会議IROS2022の関連行事として、2022年10月20、21日にThe 2022 Robotic Grasping and Manipulation Competitions が開催されました。この中のCloth Manipulation Trackに自律知能システム研究室(機械システム工学科山崎公俊研究室)のメンバーがAIS-Shinshu teamとして出場し、UnfoldingカテゴリでWinnerになりました。
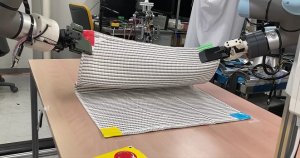
Cloth Manipulation Trackでは8チームの参加登録があり、無造作に置かれた布製品を広げる作業や折り畳む作業を自律型ロボットでいかに速くきれいに行うかが競われました。
競技会の概要、登録チーム、競技結果
https://rpal.cse.usf.edu/rgmc_


