- HOME
- 制御工学研究室
- 研究テーマ
- 研究テーマ

制御工学研究室
研究テーマ
-
基礎研究
(1)離散値入力を伴う系におけるサーボ系設計
連続値を入力できるアクチュエータは一般的に高価である傾向があるのに対し,入力が離散値のみに限定されているアクチュエータは装置が簡潔で安価である.
そこで,離散値入力アクチュエータを用いたサーボ系設計問題を対象に研究している.
サーボ制御系とは被制御量を目標値の値に追従させる制御系である.
離散値入力アクチュエータでは任意の入力を印加することができないため,目標値に追従させるための入力を印加できない場合がある.
この問題に対して,モデル予測制御により制御対象の状態を予測し,離散値入力を適切に切り替えることにより,被制御量を目標値に追従させる方法の開発を行っている.
(2)カルマンフィルタによるBLDCモータの回転速度推定
一般にブラシレスDCモータ(BLDCモータ)の回転速度はロータリーエンコーダによって観測されるが,ロータリーエンコーダは高重量かつ高価である傾向がある.
そこで,本研究では安価なセンサとしてホールセンサと呼ばれるセンサを用いて,モータの回転速度を推定することを考える.
しかし,ホールセンサはロータリーエンコーダと比較して,分解能が低く,さらにホールセンサの取り付け誤差によって,その回転速度の推定速度が著しく劣化する.
本研究では,確率統計に基づきホールセンサの取り付け誤差を評価し,カルマンフィルタにより高精度に回転速度を推定する方法を構築する.
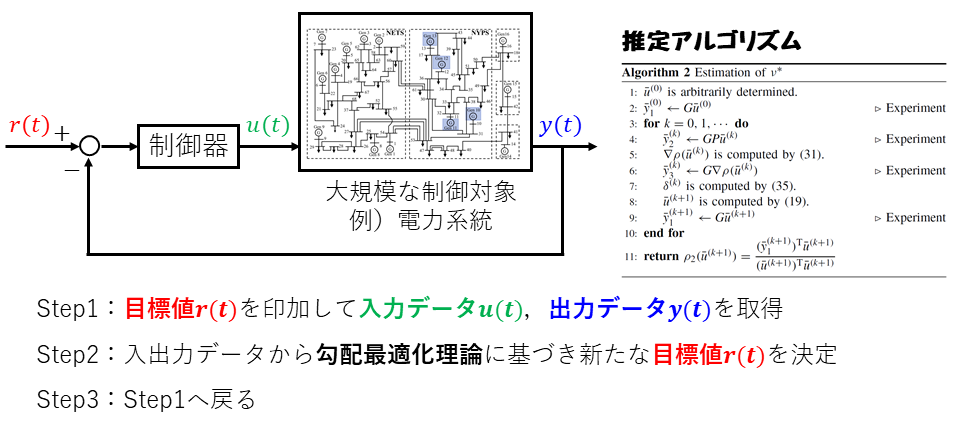
(3)入出力データに基づく受動性/安定余裕推定
目的:入出力データから制御対象の特徴(受動性/安定余裕)を推定する理論の構築.
背景:近年,システムの大規模・複雑化が進み,システム(制御対象)の正確なモデリング(状態方程式や伝達関数の導出)が困難な場合がある.こういったシステムに対しても制御系を構築したい.
期待される成果:制御対象のモデリングの手間を省き,複雑なシステムに対して特徴を推定することで,複雑なシステムに対する制御系設計が可能となる.
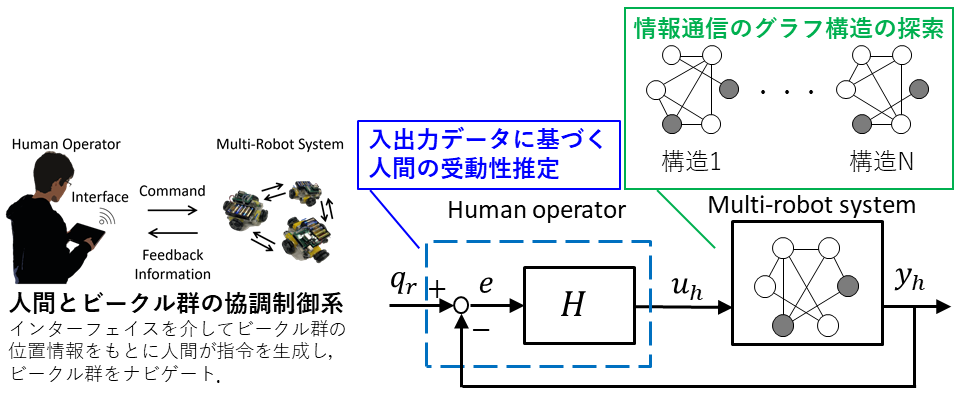
(4)人間とロボット群の協調制御系
目的:人間の受動性を入出力データから推定し,閉ループ系の安定性解析.人間にとって制御しやすいロボット群のネットワークグラフ構造の構築.
背景:未知な環境のデータ取得,災害時の被災者探索といった不確で人間が立ち入ることが難しい環境において,人間の代わりに人間により遠隔操作されたロボット群を探索させる研究が行われている.この場合,人間はボット群を動かす制御器として機能する.しかし,人間のモデリングは容易ではない.
期待される成果:人間のモデルが未知な状況において,人間の受動性を推定することで閉ループ系の安定性が解析できる.それぞれの人間に対して制御しやすいロボット群の構成を提案できる.
-
応用研究
(1)空圧式防振台のアクティブ制御
空気ばね支持によって振動を除去する空圧式除振台は,サーボ弁を用いたアクティブ制御によって性能向上が図られています.一方,サーボ弁は高価であるため,それに代わる安価な方法の構築が期待されていました.
そこで,サーボ弁に代えてオンオフ型の電磁弁を用いた除振台システムを新規提案しています.
従来の制御方法を用いた場合では,オンオフ型の電磁弁を用いると所望の性能が実現できませんでしたが,提案方法では応答性能を格段に向上させることに成功しました.
その成果は,2012年,2016年に財団法人油空圧機器技術振興財団より論文顕彰されました.

(2)自動走行履帯車両の制御
農場等において,左右の履帯のON/OFFのみで走行する履帯車両が良く用いられており,本研究では,履帯車両の自動走行を目的に制御方法の開発を行っている.
履帯車両では履帯のON/OFFのみが操作できることから,細かな制御が難しく,よく知られた線形制御理論の適用ができない.
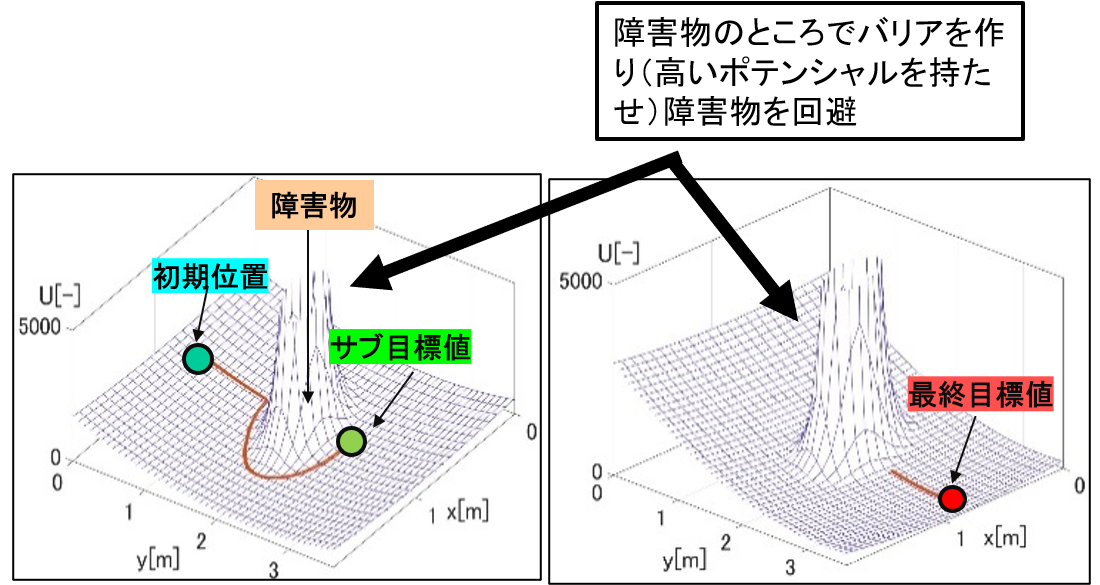
また,農場では車両が走行できない障害物も存在する.
これに対して,人口ポテンシャル法とモデル予測制御を組み合わせることで,自動で障害物を回避しつつ目標地点まで履帯車両を走行させる制御方法を構築する.
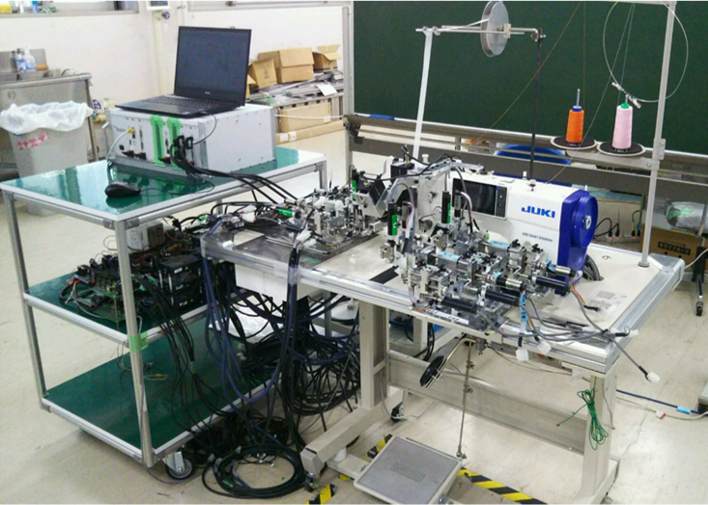
(3)自動縫製技術の開発
様々な産業において作業工程工程の自動化が行われている中,縫製産業では作業工程の殆どが自動化されていません.
これは,布が物理的なふるまいを計算機上でシミュレートすることが困難なモデル化難物体だからです.
そこで,リアルタイム画像などから布の状態を把握する画像処理技術と,制御工学のアプローチを組み合わせたビジュアルフィードバック制御を用いることで,自動縫製に必要なキー技術の構築を行っています.
 Automatic sewing.mp4
Automatic sewing.mp4

