
Robotic Systems and Control
Introduction
ぜひ次の「夢ナビ講義Video」をご覧ください!
「夢ナビ講義Video」
~SFの架空の大型ロボットを実用化するには?~
ロボット工学3原則の問題に終止符を打つべく皆さんの仮説を実験してみませんか?
新しい原理、メガネをかければ誰もが研究者に変身です。
本研究室で発見された成果は、計算時間を教科書手法よりも半減させる高速計算法、未解決であった人間-ロボット相互作用(Human-Robot Interaction)を実現する制御法、リアルタイムのカメラ動画に対して色・形の処理を不要とする視覚制御法などとして、国際一流学術論文(国際共同研究)、国際特許、国力を代表する機会メーカ(NIKKEI225)からの共同研究に至っています。
受験生の方々は一度ご訪問ください。 本研究室ではヨーロッパの大学や複数の企業と連携して研究させていただいております。
You can contact us (satorus@...) directly if you have an interest in our research. Our lab has some strong projects with big companies and European and American Universities.
(以下は学部生向けの文章です。)
ロボット工学は未完成の学問です。
しかし,ロボットが自在に動くかどうか...という問題はロボット工学の範囲を超えて社会全体の将来を左右するといえるようです。
日常で目にすることはありませんが,塗装・溶接ロボットがもし動作しなくなってしまえば工場がストップして,自動車などを作ることができなくなって社会は混乱してしまうでしょう。
反対に,同じように工場のロボットであっても,組立ロボットというのは未完成で十分には動いていないという声がよく聞かれます。動いていないために,国内から国外へ工場の移転が重なり,国外の作業者(外国人)が組立をしています。塗装・溶接とは異なって組立では手先が対象物や環境と複雑に接触(向き,位置と力)するなど,問題が難易度が異なるのです。
建設ロボット・介護ロボット・農業ロボットも(語弊がありますが)完成しておらず動作していないがために,国外から国内へ作業者(外国人)が移動してきています。建設現場・介護現場・農場を工場のように国外に移転できないのです。
このような工場や作業者の移転・移動が(学生さんの就職活動など)社会の実に様々な問題とかかわっていることは新聞紙面をみれば言うまでもないでしょう。
もちろん,全ての作業者をこれらのロボットに置換する必要があるのか,たとえば,
医療ロボット(やアシストスーツ)のように全身ではなく部位(手先部分やアーム部分)だけの置換(や補助)で十分ではないのか,という論点も社会の様々な問題とかかわっています。
一方,積極的な置換が期待される災害救助ロボットや地雷除去ロボットが完成して動作するようになれば,従来は諦めざるを得なかった人命を救うことができそうです。
ここでも両者の稼働率が大きく異なることを無視して,同じように開発することはできません。
以上のようなことから,かつての産業革命を引き起こして社会全体を激変させた蒸気機関の開発前夜と同じ状況に,現在のロボットは直面していると主張する(文系の世界的に著名な)学者もおられるようです。
蒸気機関が原動機であった一方でロボットは作業機であり,専用作業機とは原理を異にする汎用作業機として成功するかどうかが最終的には問われているように考えられます。
具体的には,人命救助という急性の問題に加えて,機械化の難病奇病(:=専用作業機では機械化が困難かつ生産台数が不足する作業の全体)という慢性の問題が解決されなければならないのではないでしょうか。
ただし,そこに至るまでの過程に価値あるテーマが多くあるように思われます。
そうは言っても,現在のところどの程度まで問題は解けていて,どの程度は成功しそうなのでしょうか。 この点においてロボット工学者と学生・マスコミ・ロボット工学以外の研究者との間に径庭が存在します。
-
Hydraulic robotics (油圧ロボットと制御)
本研究室では,(広義の)モデルベースト制御の確立に注力しています。 モデルベースト制御とは,乱暴にいえば, (ある環境の)あるロボットにしか通用しない解法(技能)ではなく, (理想的には)全てのロボットに通用する解法(技術)といえる制御のことです. 作業環境が限定的で変動しなかったり,または,既知のものとしてロボットに教えられる場合, 実験的なモデルフリー制御だけで十分です。 しかし,そうではない場合,実験的なモデルフリー制御だけでは 試行錯誤の反復回数が爆発していまうため, 理論的なモデルベースト制御が必要かつ重要です. たとえてみると,経験に基づく宮大工の作業がモデルフリーの立場であるとすれば, 力学に基づく建築士の作業がモデルベーストの立場です.
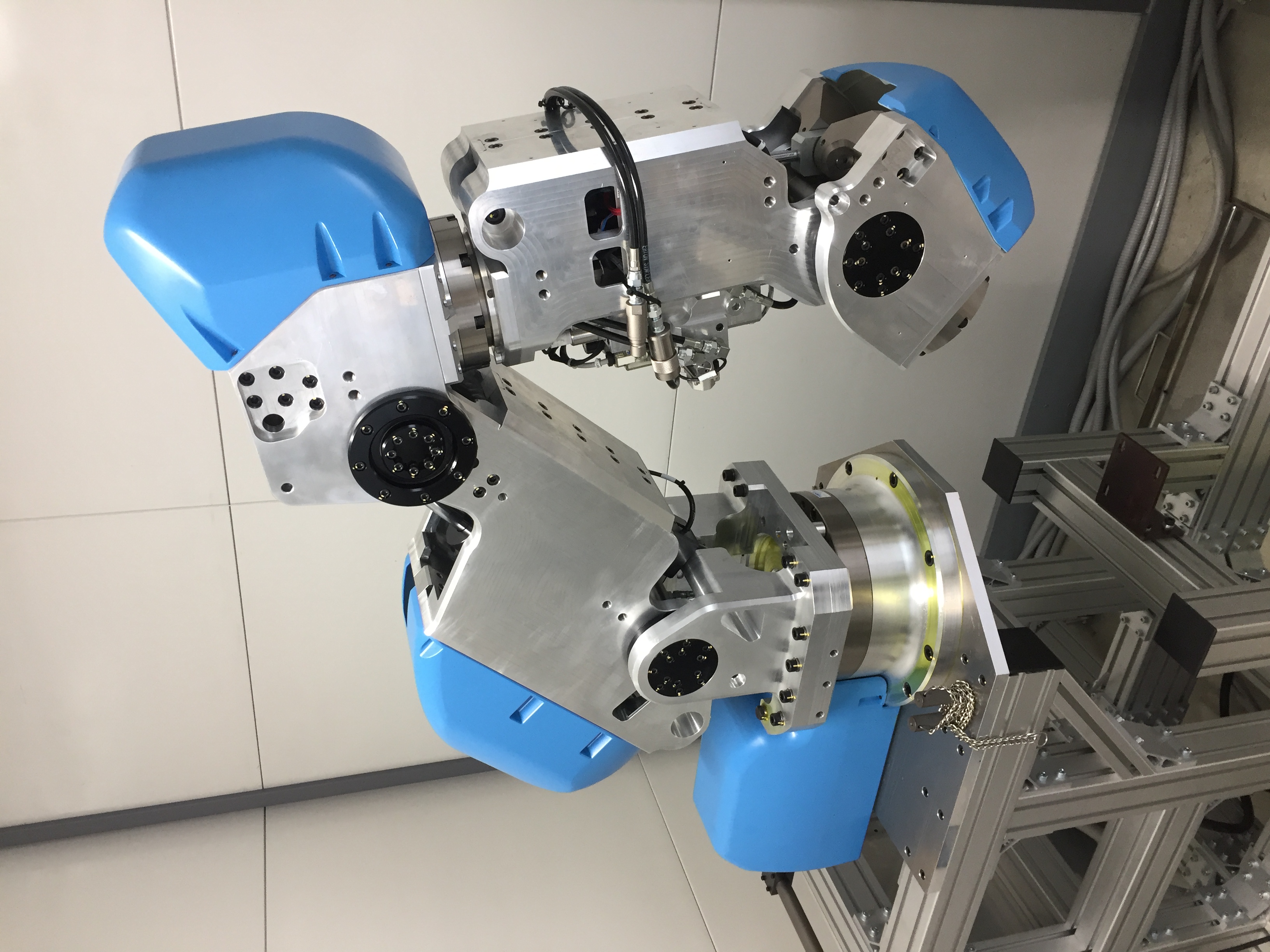
ASIMOのような電動ロボットとは異なって BigDogのような油圧ロボットは制御がさらに難しい対象でモデルベースト制御は確立されていませんが,出力が大きいため油圧ロボットを自在に(例えば,ヒトと握手できるようにモデルベーストで)制御することに成功すれば,人命救助など社会貢献につながります。 本研究室で発見された新しい制御原理を用いて(以下の動画の高速シミュレーションなどの新しい効果を確認しつつ)BigDogなどを含む油圧ロボットのモデルベースト制御の確立に注力しています。教科書の方法(上の動画)よりも約50%の計算時間で同一の計算結果を出力できる新しい計算方法(下の動画)。
-
Visual systems and control (視覚ロボットと制御)
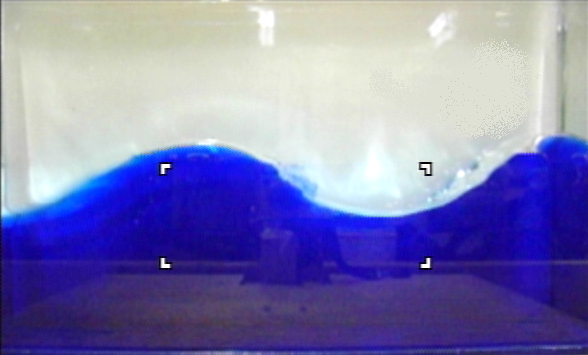
幾何的特徴(幾何特徴)を用いない一視覚制御法を研究しています。 (世界中の大学教育に使用されている倒立振子系ではなくて) 自由液面系を標準的な対象として,視覚制御の理論と実験に取り組んでいます。 無人車両系にも応用しています。
ロボットの技術の問題は一見すると企業によって十分に解決可能に見えるようです。 実際,企業によって作られたASIMOやBigDogなどのロボットが自在に動いているように見えますね。 しかし,作業環境が変動したり未知であったりすることを無視するか,無視しないか,によって問題の難易度が激変します。ポイントは無視しているか無視していないかをロボットを外から見ても判別できないということです。つまり,作業環境を固定したり既知としたりする立場でチューニングを反復したのかどうかは,ある作業環境でロボットが作業できたことを示す動画やデモンストレーションからでは判別できないのです(そして実は,ロボットを中からだけ見ても判別できません。ロボットの計算プログラムを覗いてもモデルは通常記述されていません。 最近になって,動画やデモンストレーションなどの可視化は必要ではあるが十分ではないという点をなんとなく感じ取っている鋭い学生さんも増えているようです。)
本研究ではASIMOなどのように視覚処理の計算機と運動制御の計算機を分けず,かつ, 作業環境が変動したり,または,未知のものとしてロボットに教えない場合のための,新しい視覚制御をモデルベースト制御の立場から開発しています。
-
Agricultural robotics (農業ロボットと制御)
視覚情報から直接的にアームとビークルを制御できる油圧ロボット。 (ASIMOなど数多くの他大学・他企業の全身ロボットは異なって, 制御演算用の計算機と画像処理用の計算機を"分離しない"構成であるため, 計算機本来の自由度を利用した新しい全身運動制御が可能な油圧ロボット。)

スイカ収穫ロボット(高速モード)。
センサやモータを含む電気電子要素が無いにも関わらず,把持も解放も可能なメカニカルハンド(機械要素だけなので悪環境に強く,かつ,電装関連のコストが低い)。
ヘリコプターから飛行機へ変形するビークル。

