繊維やゴム状の柔軟素材を駆使し、生物のようにしぶとく動くロボットを創る
当研究室の軸足は「機械的な柔らかさが生み出す知能的な振る舞い」にあります。生き物は高次なものから原初的な種まで、筋肉、腱、皮膚組織など3次元的に柔らかい素材で作り上げられています。この柔らかい体を制御するには、必ずしも膨大なニューロンが必要というわけではないようです。例えばイモムシやアメーバなどの原初的な生物は、非常に少ない神経組織や生化学反応などの分散された情報処理系で、ほぼ無限大ともいえる自由度を制御します。当研究室は「機械的な柔らかさ」が機械と生物の本質的な違いであると捉え、これら原初的な生物からヒントを得ながら、機械的な柔らかさによりはじめて実現できる知能を備えた実世界で活躍できるロボット作りを研究しています。繊維やゴム状素材を多用したロボットの設計はソフトロボティクスと呼ばれ、近年特に成長目覚ましい分野です。
|
|
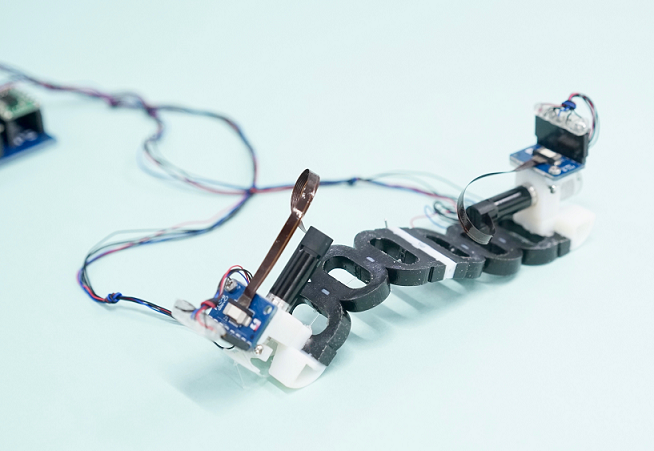
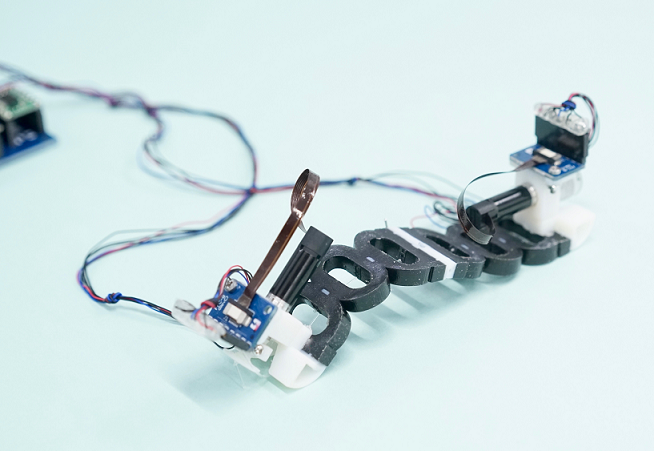
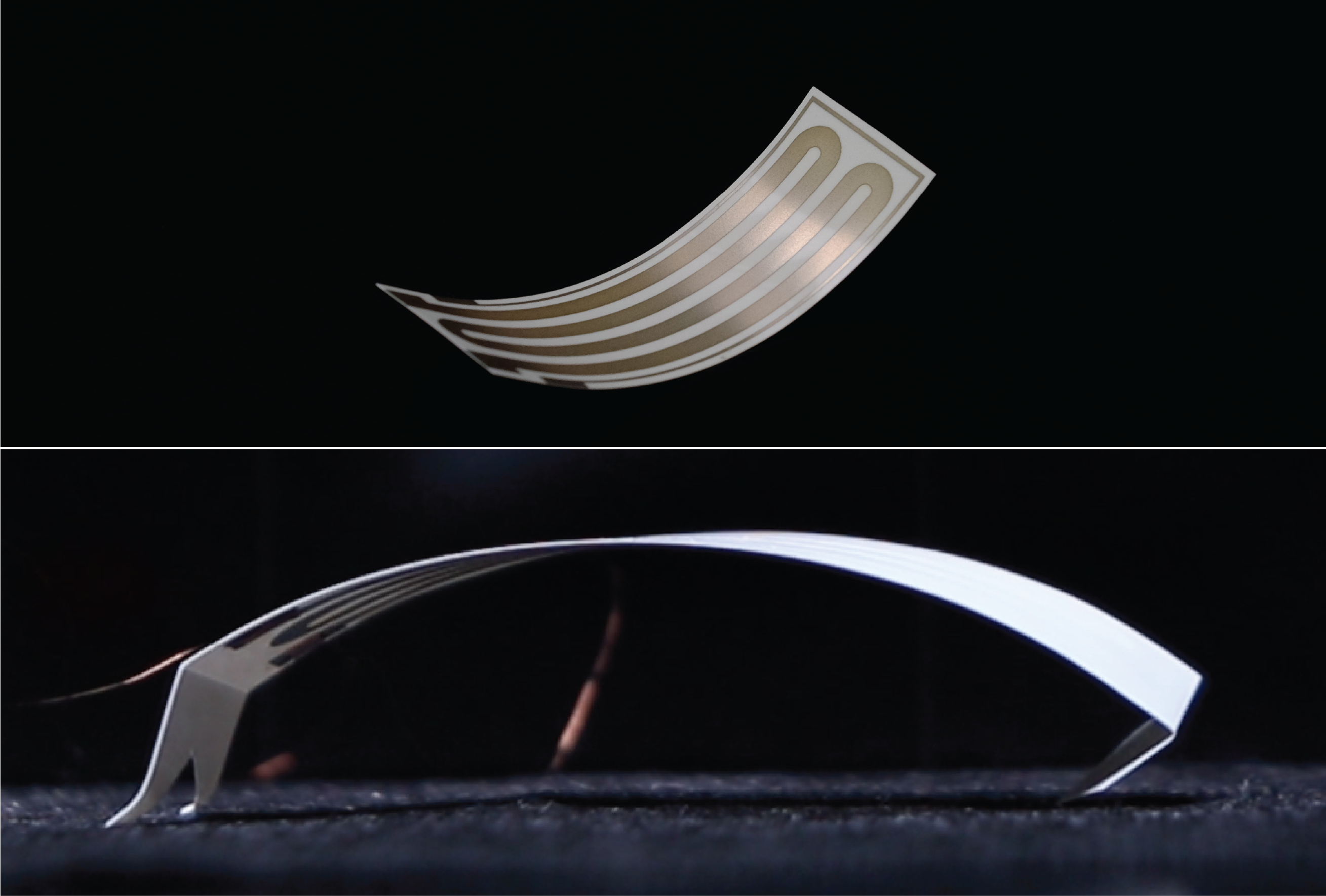
| 3Dプリントで造形したイモムシロボット。曲げ変形だけでなく圧縮変形も使うことで、より速い這行 (しゃこう) 運動と多様な振る舞いを実現。 | 銀ナノインクのインクジェットプリンターで印刷したアクチュエータ兼曲げセンサー。 |
≪研究から広がる未来≫
● 人の生活環境や自然環境で使うためのロボットの実現:例えば、電線をモニタリングするためのイモムシ型ロボットや、土の中をモニタリングするためのミミズロボットなどの実現。 ● ラピットプロトタイピングによる低価格かつ汎用的なソフト・ロボットの設計論の構築。 ● 組み立てコストや配線の手間などの激減により、今までは考えられないほどの複雑で有機的なデザインを持ったロボットを提案するような新しい学術・産業領域の創生。 ● 生物システムをさらに理解するためのプラットフォームとしてロボットを活用するRobotic-inspired Biologyの普及:ロボットではパラメータ変更が自由であるため、あり得たかも知れない生物 (life as it could be) の設計。