

令和4年度「高冷地先端農業特別演習」を実施しました


1.演習名
「高冷地先端農業特別演習」
2.演習の目的
小型無人ヘリ(ドローン)はデータ取得時期を自由に選び,航空法で定められた飛行高度から鮮明な空撮画像を取得し,農地やその周辺環境の観測に活用できる。リモートセンシングによって,農地を対象にした効率的な生産情報の収集・評価を行うための基本技術を習得する。ここでは高冷地における牧草や野菜の観測を実際に行い,ドローン機材の特徴,撮影方法,画像解析技術を学び,現地調査を行いながら,画像から読み取れる情報の解析と評価を行う。
3.実施日
令和4年9月12日(月)~14日(水)
4.実施場所
農学部附属アルプス圏フィールド科学教育研究センター(AFC)
構内ステーション
注)今年度はコロナ感染防止のため,構内ステーションで実施した。
5.担当教員
渡邉 修
6.参加人数
14名
7.演習内容の概要
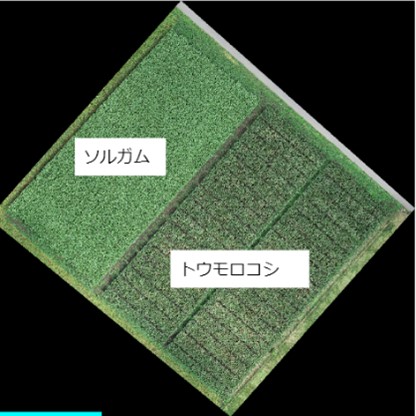
信州大学農学部AFC構内ステーションの牧草地を対象に,牧草地で問題となっているイネ科雑草チカラシバの検出を,ドローン空撮画像を用いて判別し,地理情報システム(QGIS)で雑草パッチの個数や面積測定を行う演習を行った。また隣接する飼料畑(デントコーン・ソルガム)でドローン空撮を行い,SfM(Structure from Motion)による三次元測量を行い,作物の群落高を画像処理によって推定する演習を行った。また,Pythonを用いた機械学習を行うためのデータセットの作成とランダムフォレスト法による分類に関する演習を行った。
9/12(月)
午前:集合
午後:ガイダンス(課題設定),ドローン空撮の実施,画像処理
9/13(火)
午前:QGISを利用した牧草地のセンシング
午後:Pythonを利用した画像処理
9/14(水)
午前:データ解析,レポート課題
午後:解散
8.演習の成果
信大農学部付属農場の9番牧草地でDJI製のPhantom4 Proを用い,低速度(1~2)m/s)でドローンを低空(対地高度20m)飛行させ,オルソ画像(正射投影画像)を取得した。画像からイネ科雑草チカラシバの検出を行うため,QGIS(地理情報システム)を用いてチカラシバのパッチ(群落として認識できる領域)を目視で囲い,パッチ数とパッチサイズの集計を行った。
測量用のドローンを用いて,長大型飼料作圃場の撮影を行った。DSM(数値表層モデル)画像から地面高を計測したのち,平均群落高の推定を行った。画像の測量値と実測値の差が数センチであり,非破壊で群落高の計測が可能であることが示された。
9.まとめ
これまで植生調査や雑草発生調査はコドラートなどを現地に設置し,群落を直接観測し,植物体を直接計測することでアバンダンス(存在量)を評価してきた。コドラート法による調査の精度は高いが,多くの労力がかかること,対象種の分布が均一でない場合は多数のサンプリングが必要なことがある。この演習ではドローンで取得した高解像度空撮画像を適切に処理することで,面的な情報を効率的に取得し,新しい植生調査法として利用できる。特に三次元測量は群落高を非破壊で計測でき,測定面積を容易に拡張できるため,フィールド調査での応用範囲が広い。今回の演習では空撮画像処理法とオープンソースの地理情報システム(QGIS)を活用したデータ解析のスキルを習得することに繋がった。