バイオエンジニアリング課程 西川 敦 教授ら 内視鏡ロボットでカメラ助手を代行
【概要】
内視鏡手術は、低侵襲で術後の痛みが少なく、美容面でも優位なため、急速に普及していますが、その一方で、手術が難しく外科医に大きな負担を与えています。この問題を解決するため、大型で高価な米国製の遠隔操作型手術支援ロボット「ダ・ヴィンチ」が大病院を中心に導入されつつありますが、医師不足の中小病院に導入できるような小型で低コストの国産の手術支援ロボットは存在しませんでした。
信州大学繊維学部機械・ロボット学系バイオエンジニアリング課程の西川敦教授は、大阪大学大学院医学系研究科消化器外科、大研医器株式会社(本社:大阪市)と共同で、内視鏡手術においてカメラを操作する医師(カメラ助手)の役割を完全に代行できる小型軽量・低コストの「内視鏡自動操縦ロボット」の開発に成功しました(図1)。本研究は、中小病院における医師不足の問題や大都市―地方間の医療格差の問題の解消を目指すものです。
【技術のポイント】
西川教授らのグループが開発した内視鏡手術支援ロボット(図2)は、従来のロボットの形状・構造と大きく異なり、伸縮する棒状の6本のアクチュエータが内視鏡を取り囲む「パラレルメカニズム」と呼ばれる構造で、重量580グラム、直径120ミリ、最大高さ300ミリ(内視鏡装着時は最大高さ500ミリ程度)の円筒型の小型軽量アームとして構成され、代表的な欧米のロボットに比べ、100分の1以下の重量、10分の1以下の体積を実現しました。6本のアクチュエータはポリカーボネート製で、医薬品を高精度で患者に投与する注射筒輸液ポンプの仕組みをヒントに、「水圧駆動方式」(チューブを通じて患者から離れた位置に設置したポンプから送られる水量により伸縮量を制御する方式)を採っており、漏電の可能性がなく安全・清潔で低コストです。
さらに、従来の遠隔操作型手術支援ロボットにはなかった“内視鏡を自動的に操作する仕組み”も導入されています。「ゆらぎ方程式(図3)」を用いた新しいロボット制御技術を活用することで、あたかも熟練したカメラ助手が操作するかのようなカメラワークが実現できるようになり、術者(執刀医)が見たい画像を常に映し出せるようになりました。
【リンク】
信濃毎日新聞[信毎web]
内視鏡手術、撮影お任せロボ 信大繊維学部教授ら開発
http://www.shinmai.co.jp/news/20130225/KT130222FTI090025000.php
※2013年2月25日(月)朝刊 第1社会面(31面)に掲載
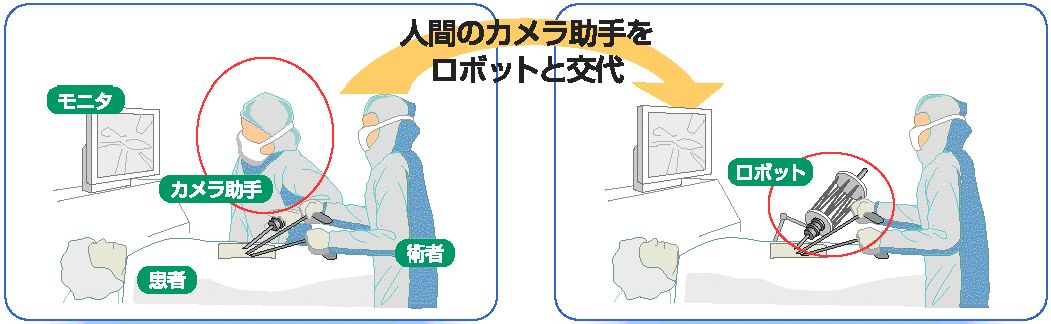
図1:研究目的(内視鏡手術においてカメラ助手の役割を完全代行するロボットの開発)
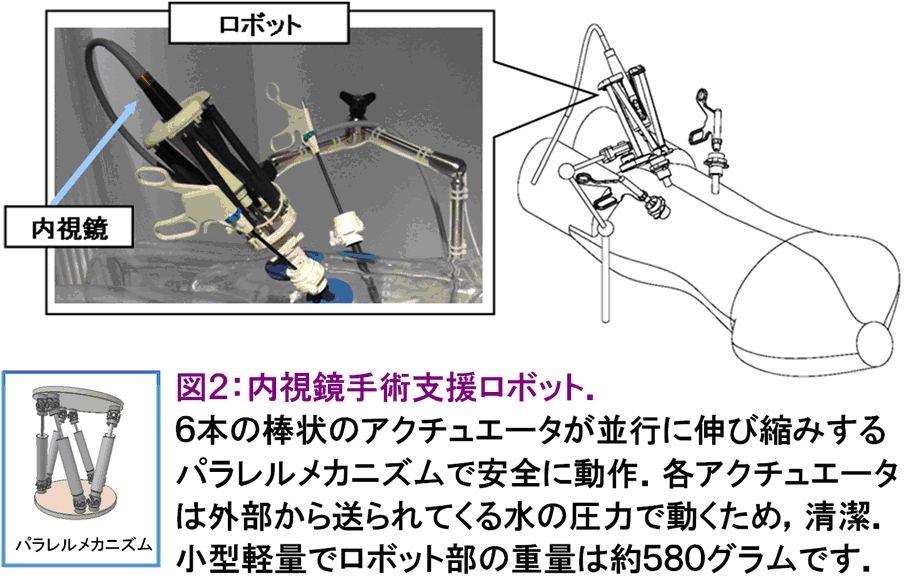
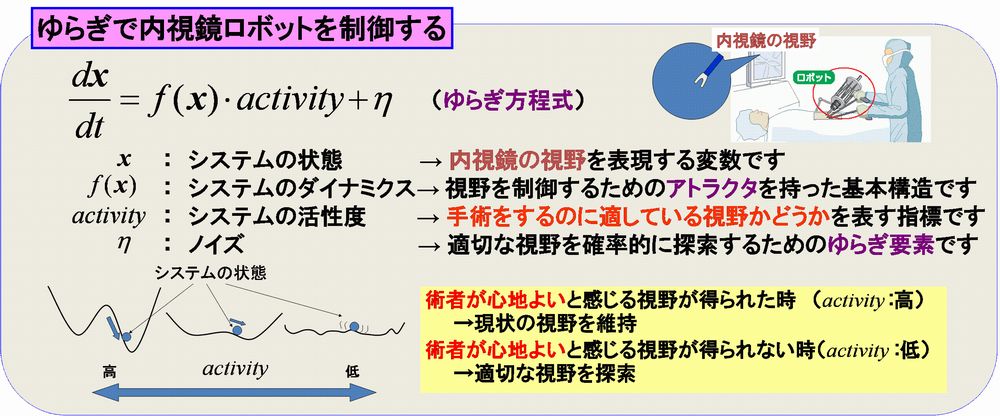
図3:ゆらぎ方程式