生物と生体の流れを操る技術と生物に負けない機能の飛行ロボの研究開発を行っています
| 教員氏名 | 青野 光 |
|---|---|
| 職名 | 准教授 |
| 所属 | 機械・ロボット学科 |
| 研究分野 | 生物機械工学、生物音響、流体工学 |
| 研究課題 | (1)生物や生体に関する流れを操る技術のメカニズム解明とその工学的な応用 |
| 出身校 | 千葉大学 |
| SOAR | 研究者総覧(SOAR)を見る |
一言コメント
生物と生体の流れに関する物理現象を一緒に解析し、その謎を解き明かしてみませんか?
研究紹介
フクロウの翼の流れ制御技術と飛行ロボットの開発
飛翔生物の中で、静粛性の優れた鳥の一つにフクロウが知られています。そのフクロウの翼には3つの特徴的な機能が備わっており、それら個々の流れを操る技術とそれを融合したときの流れ制御技術の相互作用を解明し、そのメカニズムの工学的応用を目指しています。さらに、鳥や昆虫の様に突風や雨の中でも墜落しない飛行ロボットの実現を目指しています。
|
|
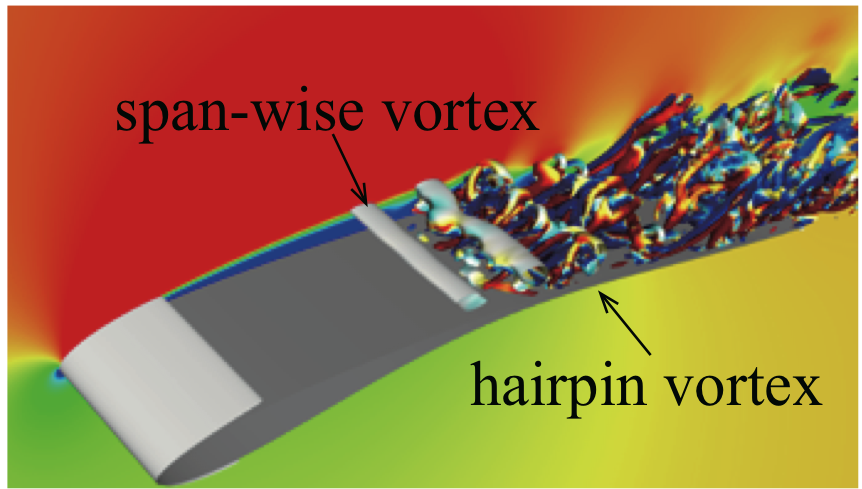
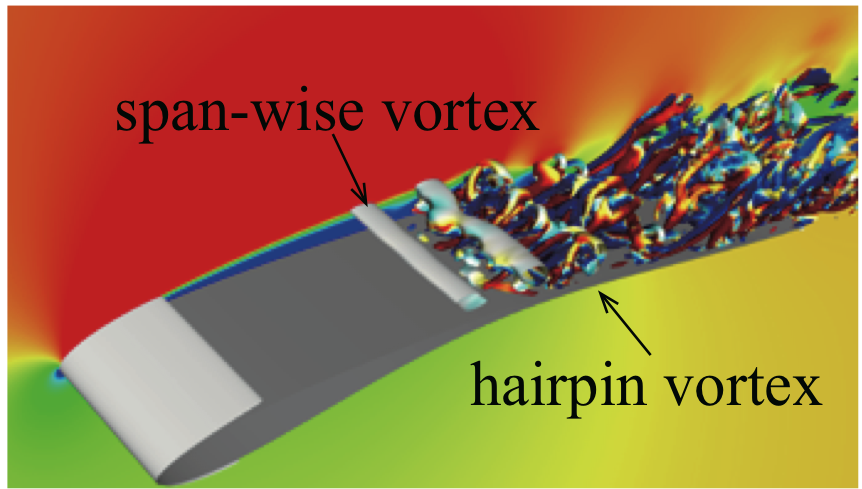
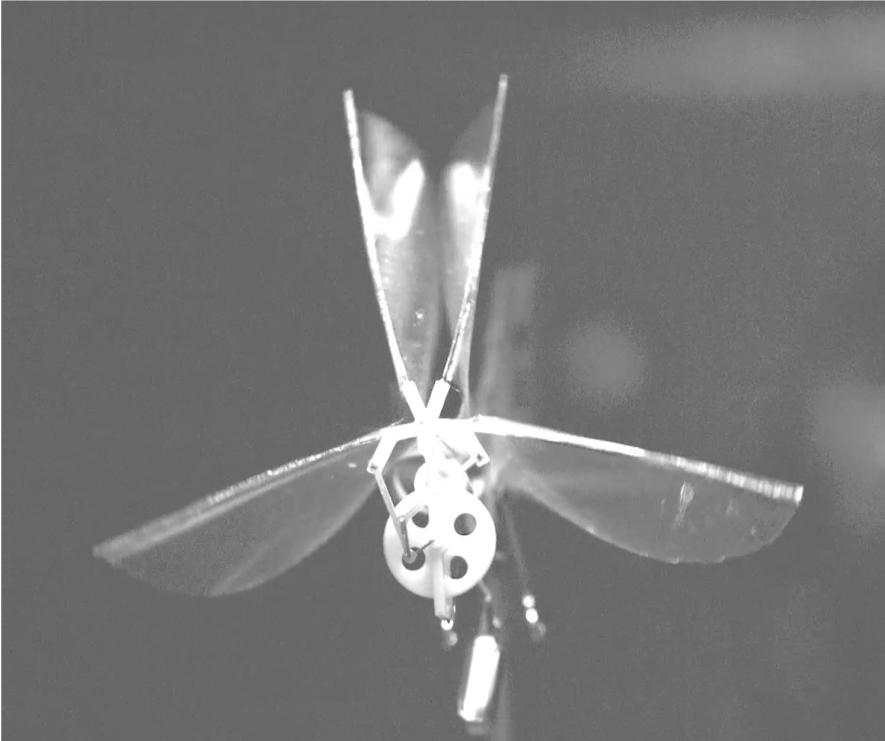
| 数値流体計算によるフクロウの翼まわりの流れ場解析。 | 羽ばたき翼の飛行ロボットの開発。 |
≪研究から広がる未来≫
様々な飛翔生物や陸上動物の優れた機能のバイオエンジニアリングするのが目標です。 さらに体中の空気の流れのついて解析も進め、長寿につながる技術や知見の体系化を実現したいです。
生物の飛行機能を解明し、羽ばたき型飛行ロボットを創る
近年、橋脚や高層ビルなどの巨大な建造物に対するメンテナンスのように人が行うと危険な作業を代理したり、人が立ち入れない場所での情報収集を行わせたりするツールとして、ドローンの活用が期待されています。高機能なドローンはこれまで比較的大型でしたが、大型ドローンの利用が不可能な場所での飛行実現を目指して最近ではドローンの小型化が進められています。しかし、こうした飛行ロボットの小型化・高性能化は簡単ではありません。 機械・ロボット学科の青野 光 准教授の研究室では、長い年月をかけて洗練された生物 (昆虫と鳥) の飛行機能やそのメカニズムについてコンピュータシミュレーションを駆使して理解することにより、これをベースとした生物飛行ロボットの開発に取り組んでいます。特に、生物の構造や機能について機械工学的な視点から議論する生物機械工学のアプローチに基づいて昆虫や鳥の翼と胴体が有する優れた機能を解析し、そこから得られる知見をロボットの開発に役立てています。
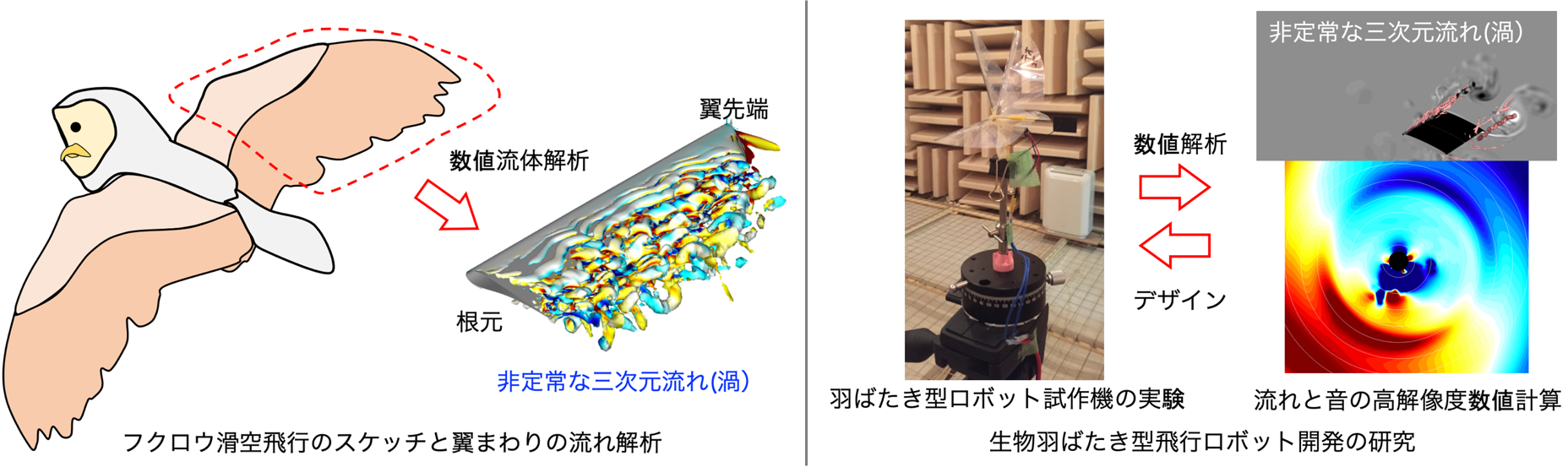
これまでの研究では、翼の形状や羽ばたき方と発生する音の関係について検討を行いました。まず、スーパーコンピュータを利用した大規模数値解析により、フクロウの特徴的な翼形状がその優れた飛行性能を支えていることを明らかにしました (図の左半分)。この検討により翼まわりの詳細な渦構造が明らかになり、ここからフクロウ飛行の静粛機能の解明に繋がる知見を得ています。そして、羽ばたき機構を有するロボットを試作して発生する空気力と空気音の関係を調べ、羽ばたき音の特性やその発生機構を明らかにしました (図の右半分)。今後、昆虫の優れた飛行性能を有し、羽音でコミュケーション可能な羽ばたき型飛行ロボットの実現を目指しています。
(掲載期間 令和 2年 5・6月)