SRP004(2019.3.17打上げ)
打上速報
『SRP004 打上げ実験を行ないました』概要
目的
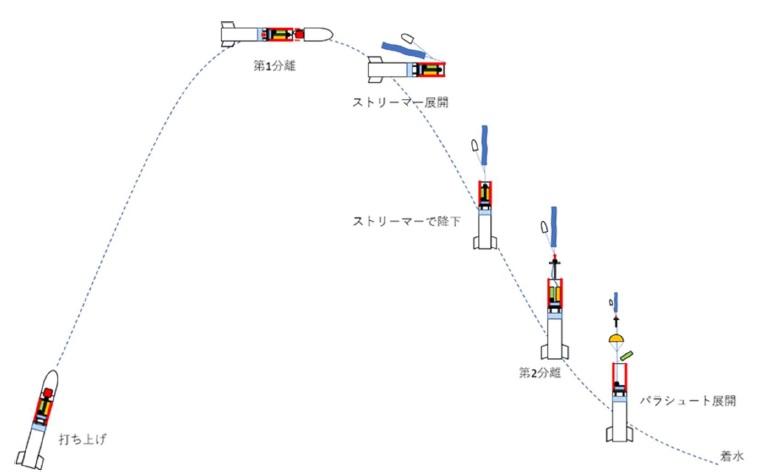
目標地点に安全かつ確実に着水させるための2段階パラシュートを搭載した 小型ロケット打ち上げ実証実験(海打ち)
-高高度の風速と風向きを考慮したシミュレーションとその実証実験-
研究開発期間
2018年4月~2019年3月
打上日時
2019年3月17日(日) 午前9時14分50秒
打上場所
秋田県能代市落合海岸
ロケットの概要
名称:SRP004
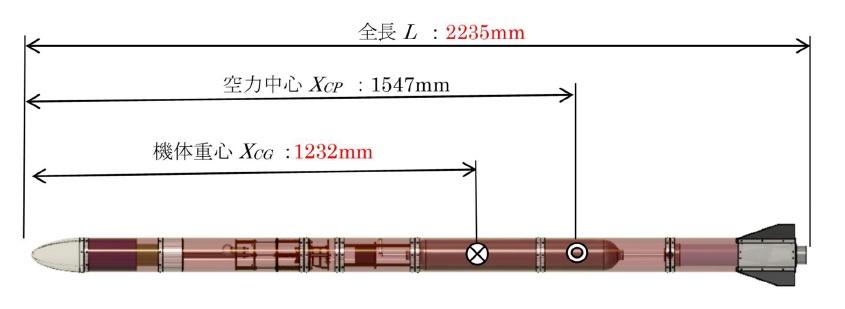
全長:2.235m
直径:φ102.5
質量:12.287(機体9.207 酸化剤3.08)kg
モーター(エンジン):自主開発
燃焼前重心位置:1.279m
燃焼後重心位置:1.215m
主な搭載物:自主開発ハイブリッドロケットエンジン,自主開発分離機構,2段階パラシュート用減速機構,パラシュート, 加速度センサ,高度センサ,GPS,無線通信器,自作テレメトリシステム,ひずみ計測器,カメラ
回収方法:軌道頂点付近で自主開発分離機構によりパラシュート放出後落下,その後テレメトリと視認での追跡,機体の位置を特定,ロケットを回収
最大到達高度:2500m(テレメトリシステムによりロケットから送られてきたデータ)
機体の回収はできなかった
特記事項:自主開発エンジン,自主開発分離機構搭載
打上の様子


メンバー
プロジェクトマネージャー:中山 昇(信州大学工学部)
プロジェクトリーダー:武井 敦子(太陽工業株式会社)
プロジェクトサブリーダー:松原 洋一(有限会社アイシスウエア)
木下 誠史郎(株式会社諏訪機械製作所)
成田 周介(株式会社ダイヤ精機製作所)
小平 裕也(太陽工業株式会社) 構造機構班 班長
廣久保 望 計測ミッション班 班長
宮澤 諒大(太陽工業株式会社) 燃焼班 班長
矢崎 耕平(高島産業株式会社)
小口 拓也(高島産業株式会社)
髙木 大和(株式会社丸眞製作所)
田中 雅樹(株式会社共進)
宮川 千宏 (不二越機械工業株式会社)
小野 邦生(株式会社小野製作所)
中村 雄太朗(野村ユニソン株式会社)
丸山 礼人(野村ユニソン株式会社)
吉江 正直(野村ユニソン株式会社)
和田 光史(株式会社キッツ)
重田 康祐(株式会社キッツ)
吉野 友章(株式会社小松精機工作所)
栗山 晃治(株式会社プラーナー)