
 教員一覧
教員一覧無限次元系を中心とした機構と動作制御からなる無限の可能性

| 一言コメント | 生物の振る舞いから学び、これまでにないロボットの機構の開発、新たな動作制御手法の構築を行っています。柔軟な素材を中心としてヒトと共存する環境下、特に医療分野で新たな価値観の創出を目指しています。 |
|---|
研究紹介
柔軟な線形状の機構で様々な用途の実現を目指す
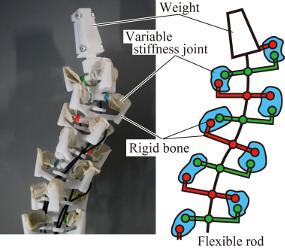
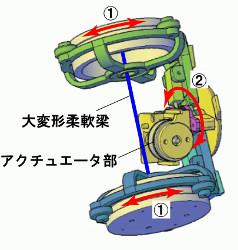
生物は身体の硬さの変化や振る舞いによって、外界に与える力や外界から受ける力を調整しています。動物の尻尾に着目してみると、線形状の部位が手の役割・体の支え・水中での移動・空中での体の姿勢の制御といった様々な用途として用いられており、用途によって尻尾の硬さの変化や動かし方を工夫しています。剛性を切り替え可能な線形状機構は、尻尾と同様に様々な用途として利用できると考えられ、医療分野においては限られた領域内での複雑な姿勢、術者の操作性向上を実現する装置として注目されています。本研究室では大変形柔軟梁に可変剛性機構を取り付けた線形状機構の開発を行い、その動作制御手法について研究を行っています。
|
|
|
| 移動ロボット本体に慣性力を伝達することを目的とした柔軟尻尾 | 大変形柔軟梁の運動を妨げず、瞬時に大変形柔軟梁の形状を保存する可変剛性機構の開発 |
≪研究から広がる未来≫
無限次元を有する柔軟体は組み合わせた機構とその動作制御によって大きく振る舞いを変えるため、柔軟体を中心としたロボットの可能性は未知数と言えます。私たちの身近に線形状が採用されている道具は非常に多く、もしそれらの線形状が自律動作可能になったら?と想像するだけで誰も考えもしなかった未来が見えてきます。柔軟体を中心としたロボットの可能性が新しい医療の世界を切り開きます。












