
生物流体力学(小林研究室)
生物遊泳の巧みさは,新しいロボット創成のインスピレーション。
血液の流れを流体力学の立場からみる。
生物の巧みな遊泳のメカニズムを調べ、そこからひらめいた新しい水中ロボット「バイオインスパイアードアクアロボット」の開発をしています。また、血液の流れを流体力学の立場から検討し、動脈硬化症など,動脈疾患のメカニズムに関する研究を行っています。その応用として、カテーテル治療に関連する医療機器の開発支援システムの研究も行っています。
バイオインスパイアードアクアロボット
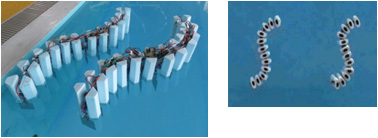
ゴカイの泳ぎからひらめいた、全方向遊泳が可能な多リンク型屈曲推進機構、「Moonswim」です。
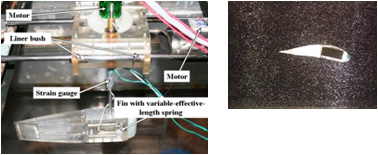
魚の尾びれのしなかやな動きに注目した,水中ロボットに用いるフィン。フィンの剛性をリアルタイムで変化させ,推進性能の向上を図ります。
粥状(アテローム性)動脈硬化症におけるプラークの力学的検討
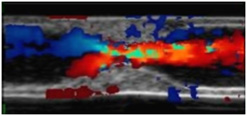
モデル実験:粥状動脈硬化症を再現した弾性をもつ模擬血管を用意し、その中に血液と同じ物性の模擬血液を流しています。この画像は超音波診断装置(カラードプラ)で得られたものです。
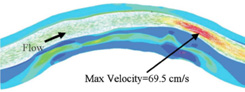
数値計算:冠動脈病変部のMRIを用いて得た画像から,3次元計算モデルを構築し,流体の流れと血管の変形を考慮した数値計算をします.これはその結果の一例です。患者特有の計算が可能となります。(米国の大学との共同研究)
信州大学 繊維学部 機械・ロボット学科
バイオエンジニアリングコース
〒386-8567
長野県上田市常田 3-15-1
電話: 0268-21-5510
Fax: 0268-21-5511