
ホーム > 研究紹介[Robotic Wear curara®]
ホーム > 研究紹介[Robotic Wear curara®]





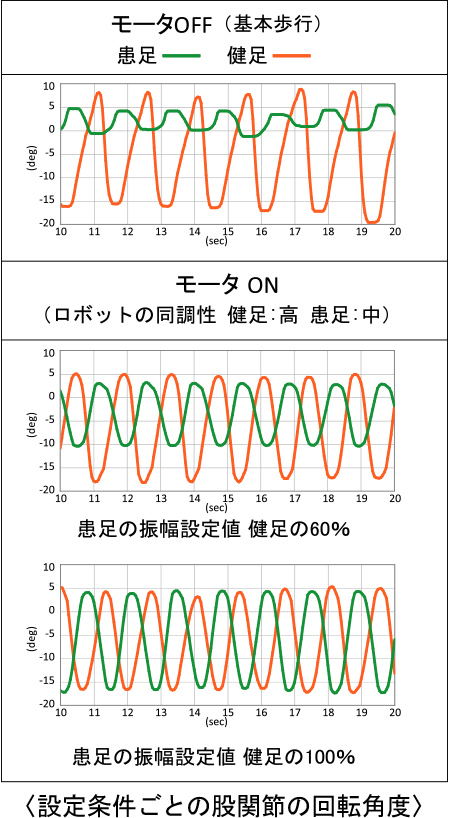
片麻痺患者さんによる装着歩行実験を実施した。
基本歩行時の健足の振幅値を基準に患足の振幅値を設定したところ、患足の設定値を健足に近づけるほど両足の振幅が揃い、歩行速度が上がった。
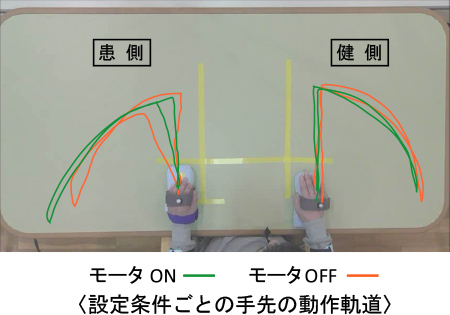
リハビリ訓練の補助を目的として、上肢ロボティックウェア装着による実験を実施した。
片麻痺患者さんに指定動作によるテーブルサンディング訓練を行ってもらった。腕長及び未装着時の動作周期から算出した設定値を用いたところ、患側に可動域の拡大と軌跡の安定が確認できた。


▲ Page Top