人間を知ることでロボットをより安全に
まずはこちらをご覧ください
詳しく知りたい方はこちら

機械・ロボティクス
- 人間機械協調
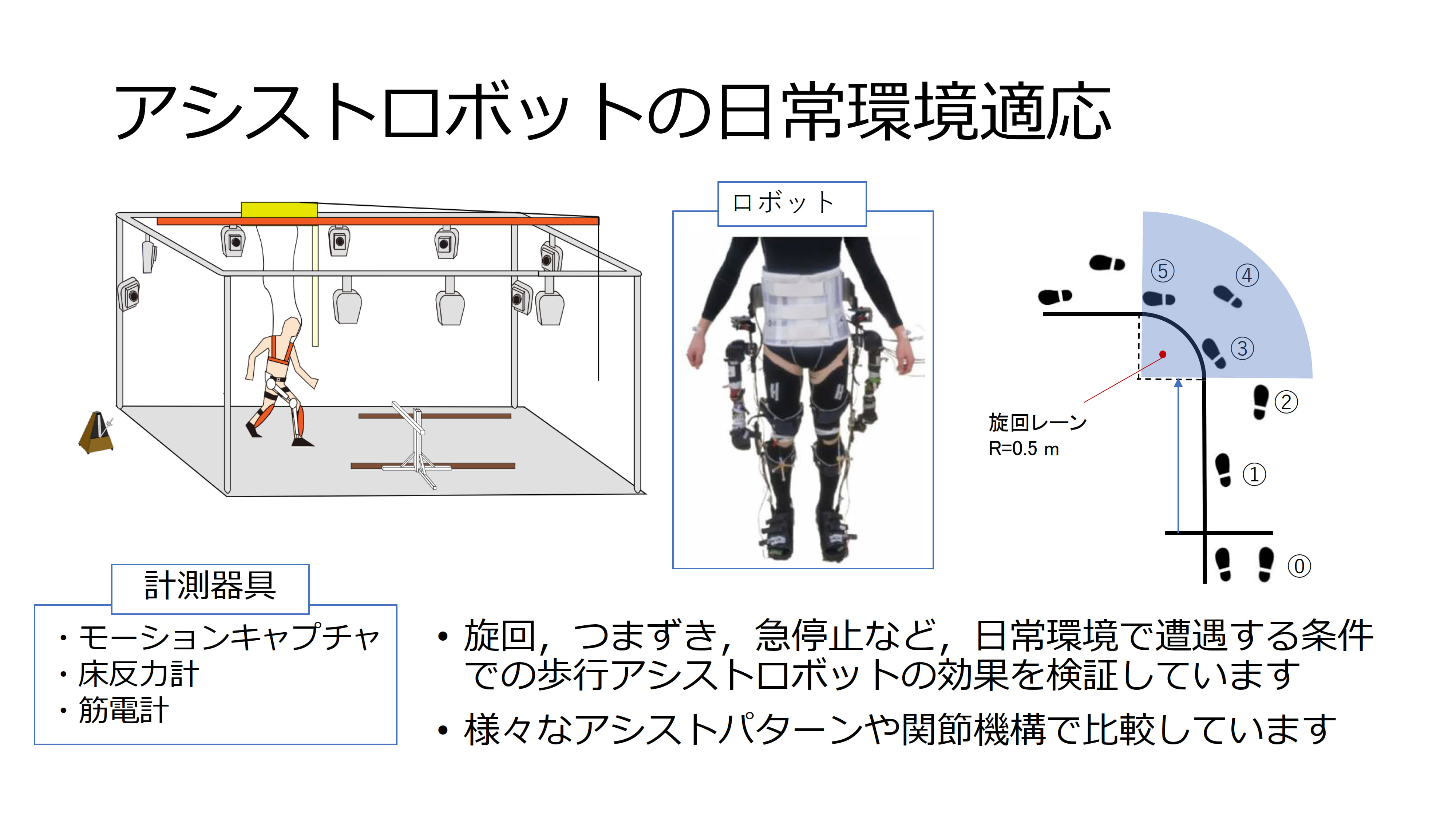
- 装着型ロボット
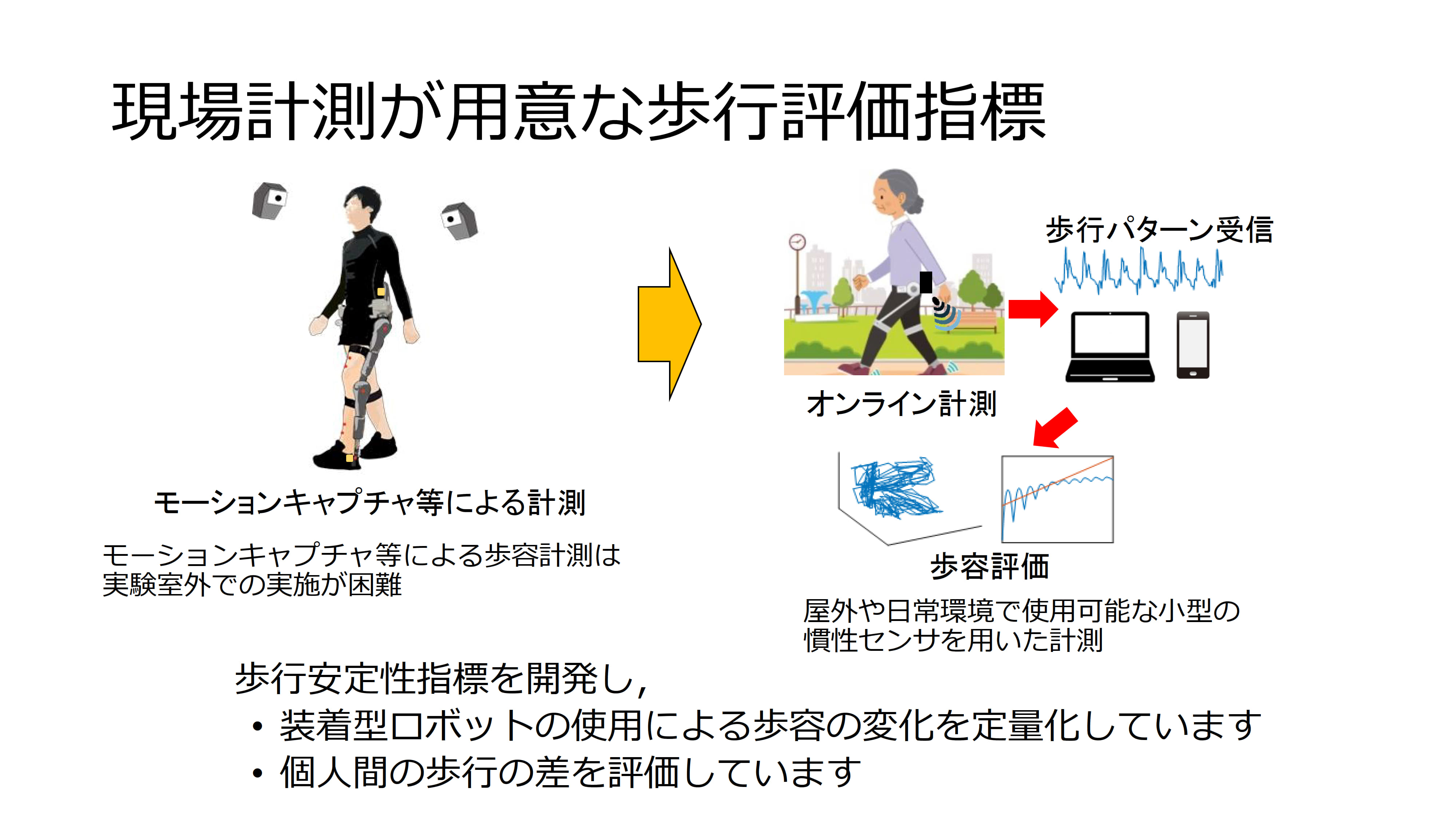
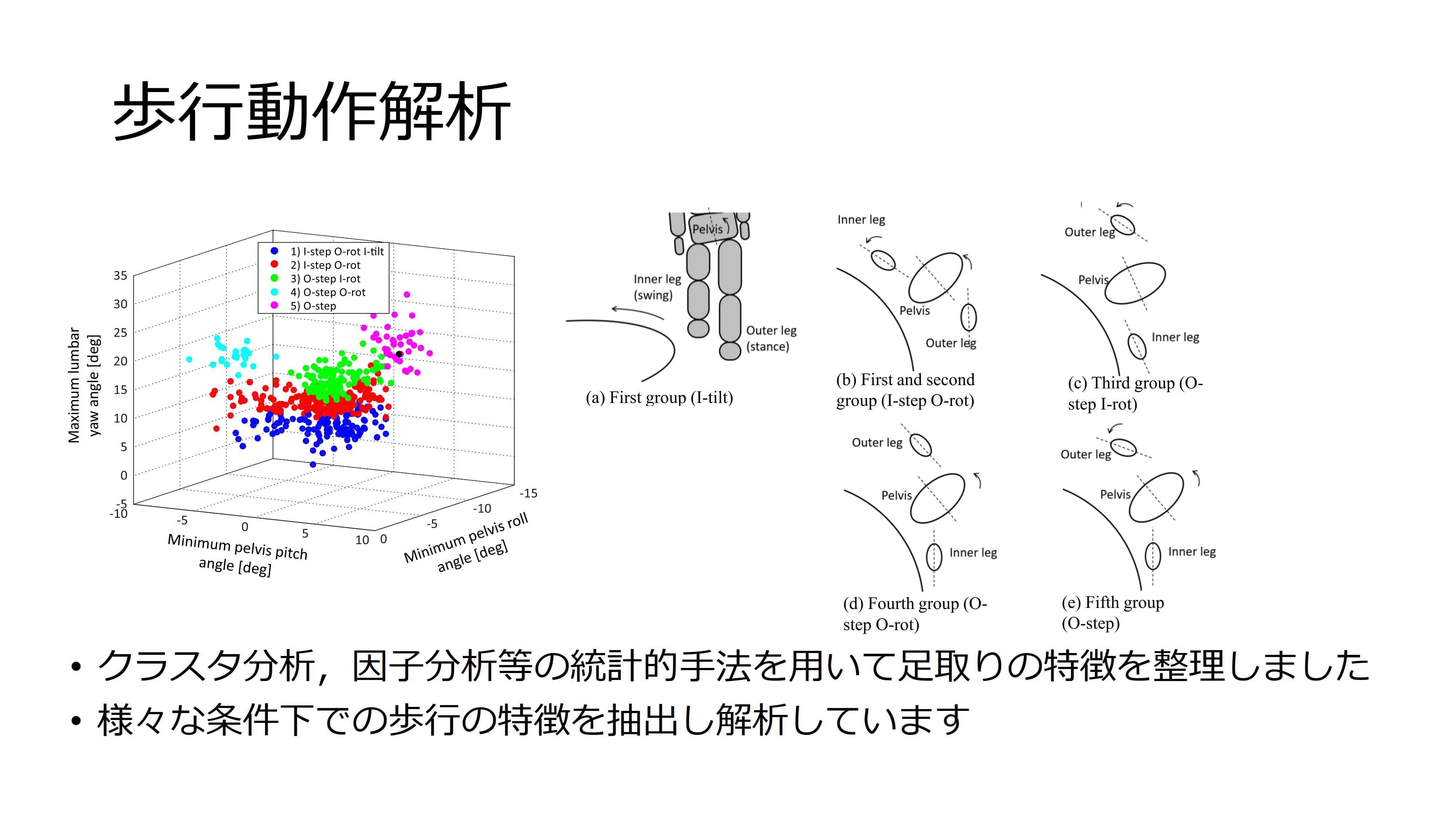
- 歩行安定性
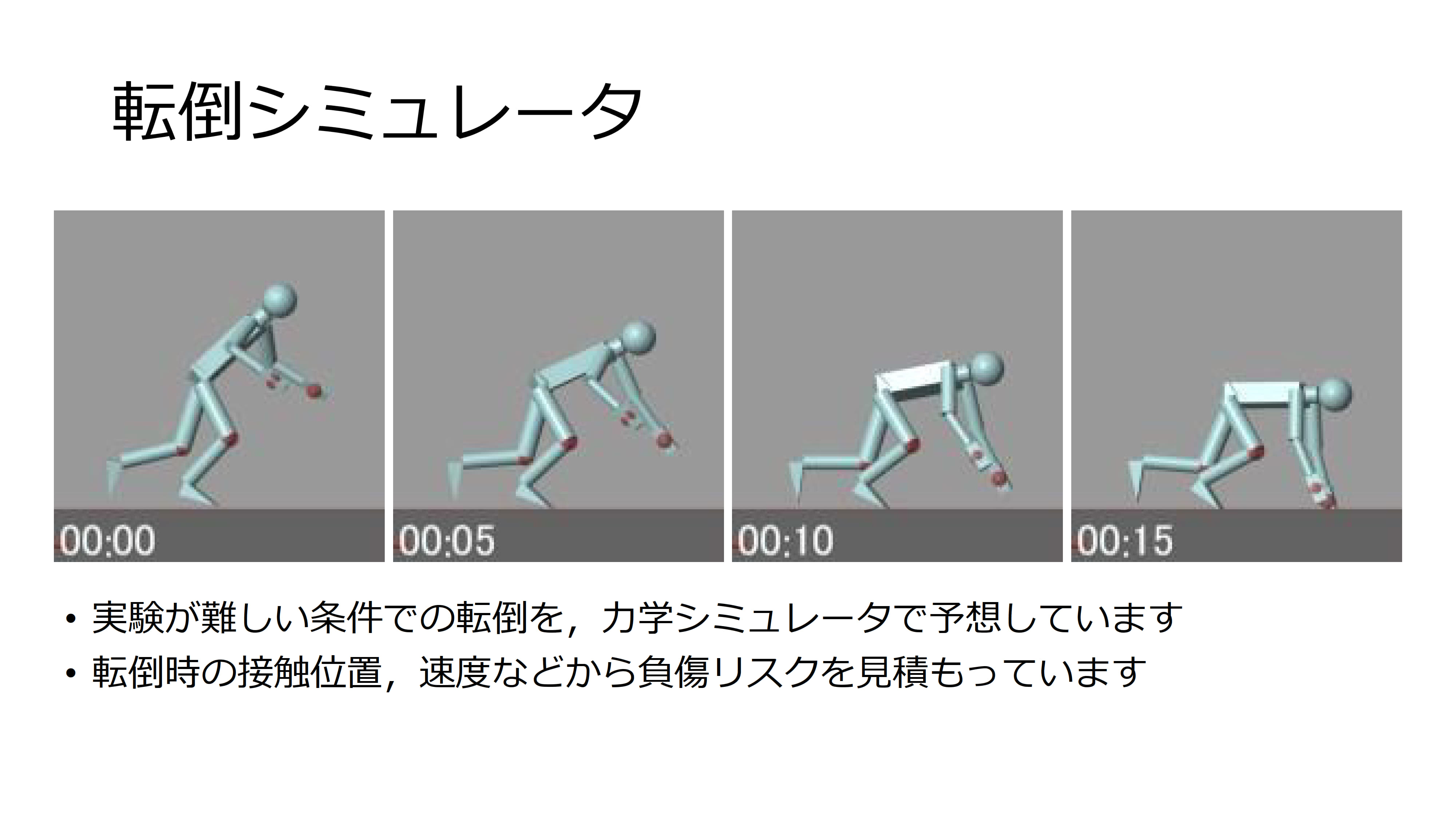
- 転倒分析
ロボットには、人間の動作を邪魔せずに人間の意図通りに動くことが求められます。人間との動作の不整合は、安全性と利便性を損ないます。そのような不整合発生状況の再現、解析技術を展示します。また、そうした状況を解決するために開発している様々なデバイスを展示します。
- 代表出展者
- 繊維学部:秋山 靖博
- 連携を希望する業種
- 製造現場、介護