未来を担う着るロボットの開発〜信州大学と繊維研究〜
ハイテクウェアが高齢者や障がい者の生活を支援する
ロボットはこれまで、いかに早く正確に制御するかをテーマに長年研究されてきました。実際、私ももともとは産業用ロボットの制御技術に関する研究を行っていました。しかし、信州大学繊維学部に着任したことをきっかけに、人がロボットを装着することで運動機能の補助ができるのではないかという考えに辿り着き、ウェアラブルロボットの研究に着手することになりました。つまり、「着るロボット」の可能性を感じたのです。
人がロボットを着ても違和感なく普段の生活を送るためには、その素材が軽量でソフトであることが重要です。堅くて重たいものでは、快適な日常生活は送れませんから。そして「運動補助」という意味では、身体運動を手助けする力を出すことのできる繊維が非常に大切になります。そうした繊維の開発が実現できれば、普通の衣服のような感覚でハイテクウェアが着用できるようになり、高齢者や障がい者の支援が行いやすくなります。将来的にそうしたロボットを完成させることが私の目標です。
人の動きに合わせるロボティックウェア
産業用ロボットとロボティックウェアの制御の考え方は大きく異なります。産業用ロボットは前もって決まっている軌道に対してスピーディーかつ正確に追従すればよいのに対し、ロボティックウェアは予測不可能な人の動きに合わせながら補助力を出する必要があります。これは本当に大きな違いです。基本的な制御技術は同じでありながら、何に重点をおいて制御するかが異なるのです。ロボティックウェアの場合は人の動きに合わせることが重要なのです。
衣服のような非外骨格型ロボット「curara®(クララ)(信州大学の登録商標)」

ロボティックウェアは人が必要とする運動を抑制せずにアシストすることが求められているのです。通常のウェアラブルロボット(ロボティックウェア)は人の周りに人とは構造の違うロボットが1台いるという感覚です。つまり、骨や筋肉の代わりに、金属や樹脂製のリンクと、それを動かすモーターを人体の外側に取り付けることで、ロボット自身の動きで人の身体を動かすという「外骨格型構造」を持っています。それに対して、現在、我々が研究しているロボティックウェア「curara®(クララ)」は、衣服のようなロボットです。要するに、衣服のように人の骨格系を利用することで形状を維持し、ロボットとしての機能も発揮できる「非外骨格型構造」ロボット。言うなれば、動く衣服、力を出す衣服です。従来の外骨格型構造では人の運動が拘束されてしまい、まっすぐに動く動作には対応できるもののスムーズに曲がれないといった欠点がありました。しかし、非外骨格型の場合は衣服のような形状で人に力を伝えていくことで、より使いやすいものになっています。curara®にも回転力によって関節の動きをアシストするモーターを使っていますが、今後さらに衣服に近づけるためには、繊維を用いて補助力を出すことも考えています。
人工筋肉の創製でより滑らかな動きを実現

「非外骨格型構造のロボットにはデメリットもあります。人が背負わなければならないので、必然的に軽量化しなければならない点です。そこで、軽量化のために電圧を加えると変形する高分子ゲル(ポリ塩化ビニルゲル)を用いた収縮型ソフトアクチュエータ(駆動装置)を利用することを考えています。これは高分子ゲルを電極で挟み、陽極にメッシュ(編み目)形状を有する電極を用いたアクチュエーターで、電圧をかけることでメッシュの隙間にゲルが侵入して厚みが縮まる力を利用したものです。筋肉のように縮まる力が関節の動きをアシストし、脳卒中などで身体機能が麻痺した人などの歩行を補助します。つまり、人工筋肉の創製を図っているのです。ロボットは堅いイメージがありますが、人工筋肉は布のように柔らかく、電圧を調整することで人の筋肉のように滑らかな動きができます。筋収縮のような動きも見られるので、触ると心臓が動いているような感覚を覚えます。ただ、現状ではまだ厚みがあるので、今後はさらに布のように薄く軽量化し、より力を増すように改良していきたいと考えています。これが実現すれば、着るだけで身体機能をアシストできるロボットが完成するのです。繊維の未来はまさにここにあると感じています。
神経振動子を用いた新たな制御の仕組み
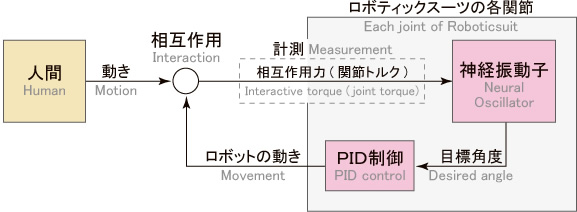
例えば、今は着ると疲れ難いスポーツウェアというのが市場に出ています。これらは布の剛性を調節することで実現しているのですが、我々はその剛性を制御することで、歩行や両足の動きのアシストを可能にしています。この制御の仕組みを説明します。 人が動くと、curara®と人の間には相互作用力が発生します。その力を関節トルクセンサが検出し、その情報に基づいて神経振動子を用いた制御が働きます。神経振動子とは、人や動物の歩行運動や呼吸といったリズミックな運動生成に用いられていると考えられているもので、リズムを生成する神経回路網を数式によってモデル化したもの。入力された周期的な信号に対して同調(引き込み)することが知られており、非常に容易に外部の事象に対して同期する機能をもつことで知られています。我々は、この神経振動子をロボットコントローラーに導入することで、ロボットが人の動作に合わせて補助を行うという独自の同調制御法の開発に成功しました。つまり、二人三脚が相手に合わせながら脚を動かさないとふたりでは歩けように、curara®も人の動きに合わせて運動するのです。
神経振動子を用いた同調制御システムの全体イメージ
握手の実験から神経振動子を用いるアイデアを考案

そもそも、人の動きに合わせたロボット研究を行うようになったきっかけは、2005年に行った人とロボットの握手の実験でした。人と人が行う握手という行為をロボットで再現できるかを研究したのです。しかし、握手はリズムや手の振りの大きさに個人差があり、前もってロボットに握手の軌道をインプットしても、人と人のようなスムーズな握手ができません。人はお互いに相手の動きやリズムを同調させながら握手をすることができるのです。ここから、人とロボットの間の相互作用力を検出して神経振動子を使う発想が生まれました。
また、介護の現場など、人が人をアシストする場合には、無理やり相手に力を加えるのではなく、相手の動作に合わせたタイミングで手助けをします。つまり、人の動きに合わせる(同調する)というのは、自然に出てきたアイデアです。
これまでロボットは人の代わりに作業を行うものとして、ただ黙々と動けばよかったのです。しかし、神経振動子を用いることで、ロボットは相手の動作の速度やリズム、振幅の大小に応じた動きが可能になりました。このように神経振動子をロボットに採用したのは私が初めてではありませんが、人とロボットのインタラクションや人をアシストする新しい視点で使ったのは我々が初めてだと自負しています。
減速機に取りつけたひずみセンサーでわずかな電圧を検出


モーターについても説明します。モーターはロボットを制御するうえで一番基本的な機能であり、使うのは当然の流れです。まず人の動きに合わせるロボットを創ろうと思ったら、現状ではモーターがもっとも使いやすいものになります。ただ、モーターは高速で回転しますが、それを50分の1から100分の1に減速する必要があります。また、減速することで力を増幅させることができます。そのため、curara®のモーターにはハーモニックドライブ®(�ハーモニック・ドライブ・システムズ社の登録商標)減速機というものをつけ、その中に「ひずみゲージ」とよばれる、ひずみ測定のための薄いシート状の力覚センサーを設置することで、ロボットと人の間に生じる相互作用力をわずかな電圧変化として検出しています。 検出された電圧は神経振動子入力され、次にロボットが動くべき軌道が算出されて同調制御をします。全く動けない人にcurara®を装着した場合はcurara®自身も動きを持っているので、人との同調性(ロボットと人間のリズムの合わせ具合)を低くすることで人に補助力を加えることができるようになります。
めざしているのは衣服のように気軽に着られるロボット

ただ、モーターには大きさや重さの問題があるので、将来的には電極を使ったゲル化も念頭に置きながら、モーターと同じような機能を持ち、且つ、軽量で柔軟なものが開発できれば、衣服のように自然に着られるロボティックウェアが可能になるでしょう。
また、より人の意志に添った動きを実現するためには、curara®をいかに身体に固定させるかが重要になってきます。外骨格型の場合は比較的、人との結合がラフでもよいのですが、非外骨格型を採用しているcurara®は人に取りつけることで人との微妙な相互作用力を検出しなければならないからです。そこでcurara®に搭載されたリブとかカフとよばれる固定部分が重要な役割を果たします。この機能にさらに衣服のデザイン技術を持ち寄ることで、3次元の人体モデルに合わせた固定方法を導き出せるのです。その設計はこれからですが、現状では人の身体に這うようにぴったりと取り付けられるものが実現できています。
いずれにせよ、めざしているのは、モーターを使ったとしても「衣服のように着られる」こと。しかも靴を履くぐらいに気軽な感覚で着用できることです。ウェアラブルロボットには、筋電位を検出するために心電図のような電極を身体に貼る必要があるものもありますが、準備だけで長時間を要します。もし簡単に着られるものが実現できれば、特別な用意をせずともすぐに使えるようになるのです。
4年間のプログラムで実用化をめざす
現在、curara®は独立行政法人科学技術振興機能(JST)のA-STEPという支援プログラムに採用されています。これは本格的な産学共同研究開発を行うプログラムで、平成24年から27年までの4年間の採択です。私はこの4年間で実用化一歩手前の試作品を完成させるべく、プロジェクトを進めています。そのために3回の試作を予定しています。現在のcurara®は1号機ですが、2号機で小型化を図り、3号機でひとつの関節(モーター)を500g以内におさめて軽量化を実現させ、さらに使いやすいものをめざしていきます。
動作としても立ち座りや上肢の動作を行えるようにします。現在は歩行動作の研究を終え、立ち上がり動作の実験を行っています。最終的には座ったところから立ち上がって歩行に移り、着座する一連の動きの実現をめざしています。上肢についても、将来的には腕を使った作業支援や上肢のリハビリ訓練での活用を考え、現在、開発中です。
ある程度動きが決まれば、それに合わせたモーターをつくることで動作のアシストが可能になります。そしてモーターは取り外しができるので、必要な動きに装着するという方法で、動作ごとにロボットを分けることができます。こうして、次世代を担うロボットとして実用化をめざしていきます。
幅広い視点で発想し、高齢化社会をアシスト
実際に世界の課題にリーチし、新しい挑戦をしていくためには、幅広い観点から物事を見据え、問題解決をする姿勢が重要だと感じています。多くの製造業は独自の素晴らしい技術で高精度な工業製品を生産していますが、人が着る製品を作る場合、求められるのは高精度ではなく着心地がよく軽量で低価格なものです。つまり、ロボティックウェアを開発する場合、自分の専門部分だけにこだわらず、幅広い目で何が大事なのかを見つめる発想の転換が大切。私自身にも言えることですが、新しいアイデアのためには、自分の専門外にあるものも活用しながら考えることが重要なのです。
長野県は小型モーターの生産が盛んで、世界をリードしていけるモーターの製造会社もたくさんあります。そして、リンゴ園をはじめとする果樹園も多くあります。しかし、農家の人たちは高齢化し、農園が減ってきています。そうした問題を、県内で生産したモーターを搭載したこのcurara®で解決していけたらよいと考えています。そうすれば多方面で長寿県・長野県の高齢化をアシストできると考えています。

信州大学大学院 総合工学系研究科 教授橋本 稔
工学博士