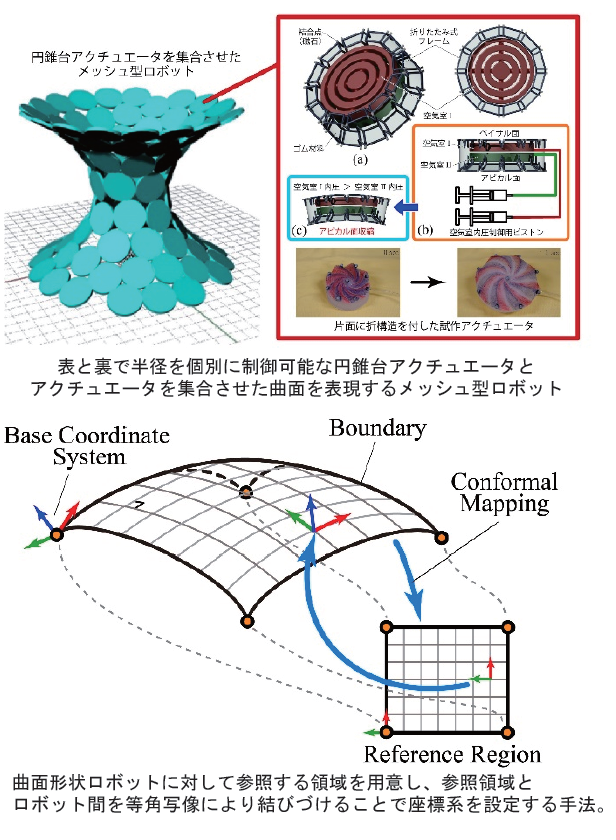
何にでも化ける曲面形状ロボットの実現を目指して
【大分類:4. テクテキスタイル 小分類:4.7 医療・ヘルスケア資材用】
信州大学繊維学部 研究紹介2020/信州大学繊維学部
| 研究者名 | 岩本憲泰 |
|---|---|
| 大学・機関名 | 信州大学 |
キーワード

【大分類:4. テクテキスタイル 小分類:4.7 医療・ヘルスケア資材用】
| 研究者名 | 岩本憲泰 |
|---|---|
| 大学・機関名 | 信州大学 |
キーワード